Zautomatyzowany kurs napędu elektrycznego wykładów. Asynchroniczny napęd elektryczny o zmiennej częstotliwości - przebieg wykładów
S=interfejsP=Mω
NI Usenkov. Elektryczny
przejażdżka po niebie NI Usenkov. Elektryczny
przejażdżka po niebie NI Usenkov. Elektryczny
przejażdżka po niebie NI Usenkov. Elektryczny
przejażdżka po niebie
Wstęp
1.1.Definicja pojęcia „ElektrycznyJednostka napędowa"
Napęd elektryczny
jest to kontrolowany elektromechaniczny
system. Jego celem jest konwersja energii elektrycznej
do mechanicznych i z powrotem oraz kontrolować ten proces.
Napęd elektryczny ma dwa kanały, zasilający i informacyjny.
(rysunek
1.1).
Przez
Pierwszy
kanał
przewieziony
zamienny
energia przepływa przez drugi kanał
kontrola przepływu energii oraz gromadzenie i przetwarzanie informacji o niej
stan i funkcjonowanie systemu, jego diagnostyka
awarie.
Kanał mocy składa się z dwóch części
elektryczne i
mechaniczny i koniecznie zawiera
łącze łączące
konwerter elektromechaniczny.
NI Usenkov. Elektryczny
przejażdżka po niebie
Rysunek 1.1. Ogólna budowa napędu elektrycznego
Zautomatyzowany system sterowania wyższego poziomuKanały połączenia
IP
Internet
PE
kanał
napęd elektryczny
Pole elektromagnetyczne
poseł
Pracownik
organ
Część elektryczna
Część mechaniczna
Kanał mocy napędu elektrycznego
NI Usenkov. Elektryczny
przejażdżka po niebie
Instalacja procesowa
System
zasilacz
Informacyjne Do części elektrycznej kanału mocy napędu elektrycznego
obejmuje konwertery elektryczne ED, transmisyjne
energia elektryczna ze źródła zasilania IP do
elektromechaniczny konwerter EMF i odwrotnie oraz
konwersja parametrów elektrycznych
energia.
Mechaniczny
Część
napęd elektryczny
składa się z
z
ruchomy korpus przetwornika elektromechanicznego,
przekładnie mechaniczne MP i korpusu roboczego instalacji, w
w którym energia mechaniczna jest wykorzystywana w sposób użyteczny.
Napęd elektryczny
wchodzi w interakcję
Z
system
źródło zasilania (lub źródło energii elektrycznej),
instalacji technologicznej oraz poprzez informację
Konwerter IP z systemem informatycznym więcej
wysoki poziom.
Elektryczny
Jednostka napędowa
używany
V
gospodarstwo rolne.
Szeroki
rozpościerający się
napęd elektryczny
NI Usenkov. Elektryczny
wskutek
cechy
elektryczny
energia:
przejażdżka po niebie Napęd elektryczny jest jednym z najbardziej energochłonnych
konsumentów i konwerterów energii. Konsumuje
ponad 60% całej wyprodukowanej energii elektrycznej.
Elektryczny
Jednostka napędowa
szeroki
używany
V
przemysł, transport i obiekty użyteczności publicznej
gospodarstwo rolne.
Elektryczny
Jednostka napędowa
jeden
z
najbardziej
energochłonni odbiorcy i przetwornicy energii.
Teoria
nastawny
napęd elektryczny
otrzymane
intensywny rozwój dzięki
ulepszenia
tradycyjne i tworzenie nowych sterowanych mocą
urządzenia półprzewodnikowe (diody, tranzystory i
tyrystory), układy scalone, rozwój technologii cyfrowej
technologie informacyjne i rozwój różnych
mikroprocesorowe systemy sterowania.
Posiadanie
teoria
V
region
nastawny
napęd elektryczny
Jest
jeden
z
najważniejsze
element szkolenia zawodowego specjalistów
NI Usenkov. Elektryczny
kierunki „Elektrotechnika,
energia i technologia
przejażdżka po niebie
1.2. Budowa i funkcje napędu elektrycznego
Funkcjonowaćelektryczny
przetwornik
PE
składa się z
V
konwersja energii elektrycznej dostarczanej przez sieć C i
charakteryzujący się napięciem Uc i prądem Ic sieci, do sieci elektrycznej
tej samej energii wymaganej przez silnik i scharakteryzowanej ilościami
Ty, ja.
Konwertery mogą być niekontrolowane lub kontrolowane. Oni
może mieć jednostronne (prostowniki) lub dwustronne (z
dostępność
dwa
zestawy
zawory)
przewodność,
Na
przewodnictwo jednokierunkowe konwertera i odwrotne (od
obciążenie) przepływ energii wykorzystuje dodatkowy klucz
element na tranzystorze służący do „odprowadzania” energii w trybie hamowania
napęd elektryczny.
Elektromechaniczny konwerter EMF (silnik), zawsze
obecny w napędzie elektrycznym, przetwarza energię elektryczną
energię (U, I) na mechaniczną (M,ω).
Konwerter mechaniczny MP (skrzynia biegów): skrzynia biegów, para
nakrętka, system N.I
Bloki,
Usenkov.korba
Elektryczny mechanizm korbowodu
przeprowadzić koordynację
moment obrotowy M i prędkość ω silnika s
przejażdżka po niebie Rysunek 1.2. Kanał energetyczny napędu elektrycznego
P2
P1
Internet
ΔPс
ΔPE
US, I s
ΔPr
ΔPм
ΔPem
Ty, ja
Mmm, ω m
M, ω
Pole elektromagnetyczne
PE
Δ Pro
poseł
ΔPr
NI Usenkov. Elektryczny
przejażdżka po niebie
RO Wartości
charakteryzujący
zamienny
energia:
napięcia, prądy, momenty (siły) prędkości, położenie wału
przestrzeń nazywane są współrzędnymi napędu elektrycznego.
Główną funkcją napędu elektrycznego jest sterowanie
współrzędnych, to znaczy w ich wymuszonym kierunku
zmian zgodnie z wymaganiami technologicznymi
proces.
Kontrola współrzędnych musi być przeprowadzana w granicach
dozwolony
projekty
elementy
napęd elektryczny,
Jak
zapewnia niezawodną pracę systemu. Są one ważne
limity są zwykle powiązane z nominalnymi wartościami współrzędnych,
zapewniając optymalne wykorzystanie sprzętu.
NI Usenkov. Elektryczny
przejażdżka po niebie Zautomatyzowane
napęd elektryczny
(AEP)
Ten
układ elektromechaniczny składający się z elementów elektrycznych
Maszyna EV połączona mechaniczną skrzynią biegów
PU z mechanizmem roboczym RM, przetwornikiem mocy SP,
System sterowania SU, jednostka czujnika BSU,
które działają jak czujniki sprzężenia zwrotnego
główny
zmienne
państwo
PE
(opcje:
położenie wału maszyny roboczej, prędkość kątowa, moment obrotowy,
prąd silnika) i dostarczanie zasilaczy
zasilanie określonych urządzeń elektrycznych.
Półprzewodnik
JV
podawać
Dla
koordynacja
elektryczny
parametry
źródło
elektryczny
energia
(Napięcie,
częstotliwość)
Z
elektryczny
parametry maszyny EV i regulacja jej parametrów
(prędkość, napięcie i zmiana kierunku obrotu
NI Usenkov. Elektryczny
przejażdżka po niebie Rysunek 1.3. Schemat blokowy automatyki
napęd elektryczny
Zasilacz
Sygnał
zadania
EM
SU
JV
BSU
PU
RM
Kanał informacyjny PE
Część elektryczna urządzenia elektronicznego
NI Usenkov. Elektryczny
przejażdżka po niebie
Część mechaniczna urządzenia elektronicznego Układ sterowania ma za zadanie sterować
konwerter mocy i jest zwykle wbudowany
mikroukłady lub mikroprocesor. Do wejścia systemowego
kierownictwo
podawane
sygnał
zadania
I
sygnały
negatywne sprzężenie zwrotne z jednostki sensorycznej
urządzenia.
System
kierownictwo,
V
zgodność
Z
wbudowany w niego algorytm generuje sygnały
sterowanie przetwornicą mocy, sterowanie
maszyna elektryczna.
Bardzo
doskonały
napęd elektryczny
Jest
zautomatyzowane
napęd elektryczny
nastawny
napęd elektryczny
Z
automatyczny
rozporządzenie
zmienne stanu.
NI Usenkov. Elektryczny
przejażdżka po niebie Zautomatyzowany napęd elektryczny dzieli się na:
Stabilizowany prędkością lub momentem obrotowym EP;
Sterowane programowo urządzenie elektroniczne wykonujące ruch
mechanizm roboczy zgodny z programem osadzonym w sygnale
zadania;
Śledzący EP, który przesuwa mechanizm roboczy
zgodnie z losowo zmieniającym się sygnałem wejściowym
Pozycyjny
PE,
zaprojektowany
regulacja położenia mechanizmu roboczego
NI Usenkov. Elektryczny
przejażdżka po niebie
Dla NI Usenkov. Elektryczny
przejażdżka po niebie Napęd elektryczny oparty na silnikach prądu stałego
aktualny
używany
V
różny
branże
przemysł:
metalurgia,
Inżynieria mechaniczna,
chemiczny, węglowy, drzewny itp.
Rozporządzenie
kątowy
prędkość
silniki
stały
aktualny
trwa
ważny
miejsce
V
zautomatyzowany napęd elektryczny. Aplikacja z
tym celem konwerterów tyrystorowych jest
jeden z nowoczesnych sposobów tworzenia regulowanych
Napęd elektryczny prądu stałego.
NI Usenkov. Elektryczny
przejażdżka po niebie Sterowanie prędkością DVT z NV odbywa się za pomocą trzech
sposoby:
1.Zmiana napięcia na tworniku silnika przy stałym prądzie w uzwojeniu
podniecenie;
2. Poprzez stałą zmianę prądu w uzwojeniu wzbudzenia silnika
napięcie twornika;
3. Łączna zmiana napięcia na tworniku silnika
uzwojenie wzbudzenia.
i prąd w
Napięcie na tworniku silnika lub prąd w uzwojeniu wzbudzenia zmienia się wraz z
przy użyciu prostowników sterowanych, z których największe zastosowanie jest
otrzymało prostowniki mostkowe jednofazowe i trójfazowe.
Podczas sterowania silnikiem poprzez obwód uzwojenia wzbudzenia kontrolowane
Prostownik został zaprojektowany z myślą o niższej mocy i ma lepszą masę, rozmiar i charakterystykę kosztową.
NI Usenkov. Elektryczny
przejażdżka po niebie Jednak ze względu na dużą stałą czasową
Najgorzej mają uzwojenia wzbudzenia napędu elektrycznego
dynamiczny
nieruchomości
(Jest
mniej
szybko działający) niż obwód twornika silnika. Więc
sposób,
wybór
więzy
kierownictwo
określony
specyficzne wymagania dotyczące napędu.
Podczas pracy z maszynami produkcyjnymi
(na przykład mechanizmy główne i pomocnicze
przekładnie w maszynach przetwórczych, mechanizmy dźwigowe,
windy) konieczna jest zmiana kierunku obrotu
silnik
(realizować
odwracać).
Zmiana
kierunkom obrotu zwykle towarzyszą takie
wymagania takie jak szybkość (i jednocześnie płynność)
hamowanie i płynne przyspieszanie.
NI Usenkov. Elektryczny
przejażdżka po niebie Można uzyskać odwrócenie kierunku obrotu silnika napędowego
zmiana polaryzacji napięcia doprowadzanego do twornika lub zmiana
kierunek prądu w uzwojeniu wzbudzenia. W tym celu łańcuch twornika lub
uzwojenia wzbudzenia wprowadzają przełącznik stykowy (rewersor) lub
zastosowano dwie sterowane przetwornice tyrystorowe.
Schemat blokowy odwracalnej przetwornicy tyrystorowej z
przełącznik stykowy w obwodzie uzwojenia twornika pokazano na rysunku. W
tego obwodu, jak w większości konwerterów przeznaczonych dla
napęd elektryczny, tryb prostowania występuje na zmianę z trybem inwersji.
Na przykład podczas przyspieszania w trybie startu i stabilizacji w
warunki
awans
masa
NA
wał
silnik
tyrystor
Przetwornica pracuje w trybie prostowniczym oddając energię
silnik. Jeśli konieczne jest hamowanie, a następnie zatrzymanie
silnik, zasilanie go energią z sieci poprzez przetwornicę
zatrzymywać się
NI Usenkov. Elektryczny
przejażdżka po niebie Tłumaczenie
silnik w tryb odwracający.
Maszyna prądu stałego pod wpływem bezwładności
masa na jej wale przechodzi w tryb generatora,
zwrot zmagazynowanej energii przez przetwornicę
do źródła prądu przemiennego (hamowanie regeneracyjne).
Schemat blokowy konwertera nawrotnego
Internet
380 V, 50 Hz
Usync
VS1
UZ1
VS6
SIFU
Uо.с
1
ID1
2
QS1
Uda
1
2
ID2
M1
LM1
NI Usenkov. Elektryczny
przejażdżka po niebie
Uz.s NI Usenkov. Elektryczny
przejażdżka po niebie
Układ przekształtnik tyrystorowy-silnik
Główny typ konwerterów stosowanych w regulowanychED DC są półprzewodnikowe
konwertery (tranzystor i tyrystor). Oni reprezentują
samosterujące prostowniki odwracalne lub nienawracalne,
montowane na zerowym lub mostkowym jednofazowym lub trójfazowym
schematy. Tranzystory mocy służą głównie do
regulacja napięcia impulsowego w urządzeniach elektrycznych małej mocy.
Zasada działania, właściwości i charakterystyka systemu TP-D
Spójrzmy na przykładowy diagram pokazany na ryc. 2.
NI Usenkov. Elektryczny
przejażdżka po niebie à)
á)
~U1
ja1
T1
e2.1
VS1
Ud
+
M2
+
Ia1
ID
UÓ1
UÓ
2
e2.2
L.M.
3
VS2
I
0
L
1
Ia2
4
5
6
UÓ2
Ñ È Ô Ó
UÑ
Rysunek
2
NI Usenkov.
Elektryczny
przejażdżka po niebie
7
M Sterowany prostownik (przetwornik) obejmuje
transformator dopasowujący T, posiadający dwa uzwojenia wtórne,
dwa tyrystory VS1 i VS2, reaktor wygładzający z
indukcyjność L i układ kontroli impulsowo-fazowej
SIFU. Uzwojenie wzbudzenia silnika OBM jest zasilane z niego
źródło.
Prostownik zapewnia regulację napięcia do
silnik poprzez zmianę średniej wartości jego pola elektromagnetycznego EP. Ten
osiąga się za pomocą SIFU, który zmienia się w zależności od sygnału UУ
kąt sterowania tyrystora α (kąt opóźnienia otwarcia
tyrystory VS1 i VS2 w stosunku do momentu, w którym występuje potencjał
ich anody stają się dodatnie w porównaniu do
potencjał na katodzie). Gdy α = 0, tj. tyrystory VS1 i VS2
odbierać impulsy sterujące Uα z SIFU w określonym momencie,
Przetwornica realizuje prostowanie pełnookresowe
i do twornika silnika przykładane jest pełne napięcie. Jeśli z
za pomocą SIFU, dostarczając impulsy sterujące do tyrystorów VS1 i
VS2 występuje z przesunięciem (opóźnieniem) o kąt α ≠ 0, a następnie o SEM
konwerter jest zmniejszony, a zatem maleje
średnie napięcie dostarczane do silnika.
NI Usenkov. Elektryczny
przejażdżka po niebie Zależność średniej wartości pola elektromagnetycznego konwertera wielofazowego
z kąta sterowania tyrystora a ma postać:
(1)
ECP Emax m sin m cos ECP 0 cos
gdzie m jest liczbą faz;
E - wartość amplitudy pola elektromagnetycznego przetwornika;
ESR0 - SEM konwertera przy α = 0.
Aby zmniejszyć szkodliwe skutki tętnienia prądu w docelowym tworniku
Zwykle włącza się reaktor wygładzający, którego indukcyjność L
dobierany jest w zależności od dopuszczalnego poziomu tętnienia prądu.
Równania właściwości elektromechanicznych i mechanicznych
silnik:
(2)
(3)
ECP 0 cos k I RЯ RP k
ECP 0 cos
k M RЯ
RP
k 2
Gdzie
- opór równoważny
RP x T m 2 RT RL
przetwornik;
xT, RT - odpowiednio zredukowane do uzwojenia wtórnego
indukcyjna reaktancja rozproszenia i rezystancja czynna
uzwojenia transformatora;
RL jest aktywnym oporem reaktora wygładzającego.
NI Usenkov. Elektryczny
przejażdżka po niebie W zacienionym obszarze silnik pracuje w trybie
prąd przerywany, który określa zauważalną zmianę (spadek)
sztywność cech. Ze względu na przewodnictwo jednokierunkowe
charakterystyka konwertera znajduje się tylko w pierwszym
(1...3 przy α = 0; 30, 60°) i czwarty (4...7 przy α = 90, 120, 150, 180°)
ćwiartki. Mniejsze kąty sterowania odpowiadają większemu EP i
stąd wyższa prędkość obrotowa silnika; przy α = π/2 EMF
UV EP = 0 i silnik pracuje w trybie hamowania dynamicznego.
Na ryc. Rysunek 3 pokazuje schemat obwodu elektrycznego z mostkiem trójfazowym
nieodwracalne promieniowanie UV.
NI Usenkov. Elektryczny
przejażdżka po niebie ~ 380 V; 50 ö
T1
UÑ
UÓ
Ñ
È
Ô
Ó
U
VS1
+
VS6
VS1
VS4
VS3
VS6
VS5
VS2
Ud
L
ID
M1
+
L.M.
-
UB
NI Usenkov.
Elektryczny
Rysunek
3
przejażdżka po niebie
-Aby uzyskać charakterystykę silnika we wszystkich czterech
ćwiartki wykorzystują odwracalne prostowniki sterowane,
które składają się z dwóch nieodwracalnych prostowników, na przykład z
pin zerowy Rys. 4.
A)
~ 380 V; 50 Hz
B)
T1
2
UС
U
U
Z
I
F
U
VS1
+
VS6
VS1
VS4
VS3
VS6
VS5
VS2
L1
-
2
L
1 minuta
0
min
M
1 2
1 maks
M1
UB
2 2
L2
+
maks
-
NI Usenkov.
Elektryczny
Rysunek
4
przejażdżka po niebie Odwracalny
są nazywane
konwertery,
pozwalać
zmienić polaryzację napięcia stałego i prądu w obciążeniu.
Odwracalne fale uderzeniowe opierają się na dwóch podstawowych zasadach
sterowanie zestawami zaworowymi: wspólnym i osobnym.
Wspólna kontrola obejmuje zasilanie z systemu
sterowanie impulsowo-fazowe tyrystorów impulsów sterujących
Uα jednocześnie do tyrystorów obu zestawów - VS1, VS3, VS5
(grupa katodowa) i VS2, VS4, VS6 (grupa anodowa). Jednocześnie z powodu
obecność kąta przesunięcia między impulsami sterującymi dwóch zestawów
tyrystory zbliżone do π, jeden z nich pracuje w prostowniku
trybie i przewodzi prąd, a drugi, pracując w trybie falownika, przewodzi prąd
nie prowadzi. Aby zapewnić takie zarządzanie pomiędzy środkiem
muszą istnieć wartości pola elektromagnetycznego prostownika i falownika
stosunek
jednak ze względu na różnicę wartości chwilowych
Pomiędzy zestawami tyrystorów przepływa tzw. pole elektromagnetyczne
prąd wyrównawczy. Aby to ograniczyć na schemacie pokazanym na ryc.
4, a, zapewniono reaktory wyrównawcze L1 i L2.
NI Usenkov. Elektryczny
przejażdżka po niebie Obwody przetwornika zaworowego,
zapewniając zmianę kierunku
przepływ energii
W zautomatyzowanych napędach elektrycznych
dostosować prędkość silnika napędowego.
wymagany
Podczas korzystania z maszyn prądu stałego występuje
zadaniem jest nie tylko regulacja prędkości obrotowej, (np
ze względu na zmiany napięcia zasilania), ale także
zmiana kierunku obrotów (wsteczny). Dla tego
konieczna jest zmiana polaryzacji napięcia na
obciążenia i kierunek prądu w obciążeniu.
Ten problem rozwiązano za pomocą specjalnego
Przetwornica DC/DC bez użycia
sprzęt kontaktowy,
tzw. odwrót
NI Usenkov. Elektryczny
Przetwornica prądu stałego
prąd składający się
przejażdżka po niebie składający się z dwóch zestawów zaworów, z których każdy
zapewnia, że prąd przepływa przez obciążenie tylko w jednym
kierunek.
Wszystkie istniejące obwody konwerterów zaworów przełączających
można podzielić na dwie klasy:
schematy krzyżowe („ósemka”) i
obwody typu back-to-back.
W obwodach krzyżowych (rysunek a - zero i b - mostek)
transformator posiada dwie grupy izolowanych uzwojeń zaworowych,
z którego zasilane są dwa zestawy zaworów.
W obwodach typu back-to-back (rysunek c) potrzebny jest tylko jeden
grupa uzwojeń zaworowych transformatora.
W odwrotnej kolejności
Czy:
konwertery
bardzo
zero trójfazowe;
podwójny trójfazowy z korektorem
reaktor i
NI Usenkov. Elektryczny
przejażdżka po niebie
wspólny Trójfazowy konwerter nawrotny
z zerowym wyjściem
A
T1
C
Usync
N
A
UZ1
B
b1
1
c1
a2
B
c2
2
Ilvl2
LUR1
ID1
Uda
Ilvl2
VS1…
VS3
UZ2
LUR2
ID2
M1
NI Usenkov. Elektryczny
LM1
przejażdżka po niebie
VS4…
VS6
SIFU 1
SIFU 2
Usync
Uz Do obwodów indukcyjnych stosuje się trójfazowe obwody prostownicze
obciążenie do zasilania uzwojeń wzbudzenia maszyn elektrycznych,
sześciofazowy
do zasilania obwodów kotwicznych silnika,
dwunastofazowe, szczególnie mocne napędy elektryczne.
Działanie konwertera nawrotnego
Załóżmy, że w początkowej chwili czasu maszyna
obracać w kierunku zgodnym z ruchem wskazówek zegara z prędkością n obr./min. Jednocześnie ona
opracował Eak wstecznego pola elektromagnetycznego i prąd I przepłynął przez obwód twornika
(rysunek
). Maszyna była zasilana od początku
zespół zaworowy konwertera UZ1 pracujący w
tryb prostowniczy. Aby zmniejszyć prędkość obrotową
maszynę, należy wówczas zmniejszyć dostarczane do niej napięcie zasilające
istnieje potrzeba zwiększenia kąta sterowania tyrystorem
VS1, VS2, VS3 prostownika UZ1.
NI Usenkov. Elektryczny
przejażdżka po niebie Jednocześnie, ze względu na bezwładność silnika, jego Eyak z tylnym EMF nie może
zmienia się gwałtownie i okazuje się być większe niż napięcie Ud1 przy
Wyjście
przetwornik
(NA
zakotwiczony
silnik).
Zawory
konwerter UZ1 zostaje szybko zamknięty, a prąd obciążenia zostaje zmniejszony
do zera. Ale na zaciskach łańcucha twornika maszyny elektrycznej
obracając się przez bezwładność, utrzymuje się tylne pole elektromagnetyczne E, które
pozwala na użyteczne wykorzystanie energii kinetycznej ruchu obrotowego
napęd, zamieniając go na elektryczny, a przy tym szybko
zahamuj samochód elektryczny.
Aby to zrobić, musisz przekonwertować pierwszy zestaw zaworów na
trybie falownika, czyli zwiększ kąt α1 > 90°. Ale pierwszy
Zestawu konwertera UZ1 nie można stosować w falowniku
trybie, ponieważ konieczna jest odwrotna polaryzacja w maszynie
napięcie Ud1. Dlatego drugie
zestaw zaworowy UZ2 (α2 > 90°), do którego wyjście jest podłączone
obciążenie równolegle do wyjścia pierwszego zestawu UZ1. Samochód
pracuje w trybie generatora, a więc jego prędkość obrotowa
spada. W związku z tym back-EMF Eak, czyli
napięcie zasilania N.I.
dla Usenkowa.
drugi Elektryczny
Zestaw UZ2 działający w
tryb falownika. przejażdżka po niebie N
Hamulec
Przenosić. mi
Podkręcanie
tryb
Przenosić.
tryb
0
T
Odwracać
I
mi
0
T
<90
UZ2
W
I
>90
I
>90
<90
UZ1
W
UZ1
<90
W
Rysunek 1.2. Schemat trybu pracy
Maszyna elektryczna prądu stałego
NI Usenkov. Elektryczny
przejażdżka po niebie Zatrzymując maszynę elektryczną (Eyak=0; n=0) można
przerobić drugi komplet zaworów UZ2 na prostownik
tryb (α2<90°). При этом электрическая машина опять переходит
w tryb silnika i jest zasilany przez drugi zestaw zaworów
UZ2.
Kierunek
obrót
samochody
zmiany
NA
odwrotnie (rewers silnika) i uruchamia się ponownie
przyspieszyć (od n=0 do danej prędkości obrotowej, np
n=nom w trzeciej ćwiartce współrzędnych napędu elektrycznego: n i I lub n
oraz m).
Jeśli ponownie wymagane jest odwrócenie kierunku, wówczas
kąta α2 drugiego zestawu zaworów UZ2, jego zawory są zamknięte.
Pierwszy zestaw zaworów UZ1 przekształcany jest w falownik
trybie (α 1>90°) kierunek prądu twornika Id jest odwrócony,
Maszyna elektryczna działa w trybie generatora do
całkowite zatrzymanie silnika.
Następnie, wraz ze spadkiem kąta α1>90°, pierwszy zestaw
zawory UZ1 zostają przełączone w tryb prostowniczy i
silnik jest rozpędzany do zadanej prędkości obrotowej.
NI Usenkov. Elektryczny
przejażdżka po niebie Charakterystyka regulacji odwracalnej
przetwornik
Uda
Ud0
Udα1
α1
Tryb
prostownik
0
Udβ1
π
π/2
Tryb
falownik
α2
β1
-Ud0
Udβ
NI Usenkov. Elektryczny
przejażdżka po niebie
α
β Jeśli średnie wartości napięcia są równe przy
na wyjściu UZ1 i UZ2 otrzymujemy wyrażenie
Udocosα1= Udocosβ2.
Dlatego konieczne jest, aby α1 = β2. Od kiedy
tryb falownika β =180°- α, wówczas warunek równości
średnie wartości napięć w obwodzie wyrównawczym
można przedstawić jako α1+ α2 =180°, gdzie α1 i α2 to kąty
sterowanie tyrystorami pierwszego i drugiego zestawu
zawory liczone od punktu naturalnego
odblokowanie tyrystorów.
NI Usenkov. Elektryczny
przejażdżka po niebie Charakterystyka zewnętrzna odwracalna
przetwornik
Charakterystyka zewnętrzna prostownika i falownika
zestawy w tym przypadku są kontynuacją jednego
inny i podaj liniowy wynik zewnętrzny
Charakterystyka konwertera nawrotnego
Uda
β1
α1
β1 > β
2
α2 > α
β3 > β
2
1
α3 > α
2
Tryb
falownik
Tryb
prostownik
0
NI Usenkov. Elektryczny
przejażdżka po niebie
ID Wspólne sterowanie zaworem
w zestawach
Jeśli impulsy sterujące zostaną zastosowane jednocześnie do
zawory obu zestawów UZ1 i UZ2 oraz kąty sterujące
tyrystory spełniają ten warunek
α1 + α2 = π,
kontrola
zawór
uzgodnione.
grupy
NI Usenkov. Elektryczny
przejażdżka po niebie
zwany Oddzielne sterowanie zaworami
w zestawach
W celu uzyskania napędu elektrycznego działającego we wszystkich czterech
ćwiartki pola: ω – I lub ω – M, należy zastosować odwrotność
przetwornica tyrystorowa zapewniająca przepływ prądu twornika
silnika w obu kierunkach.
Przetwornice nawrotne zawierają dwie grupy tyrystorów,
połączone ze sobą przeciwrównolegle.
W obwodzie tym znajdują się dwa komplety zaworów UZ1 i UZ2, każdy zmontowany
trójfazowy obwód mostkowy, połączony równolegle ze sobą
przeciwna polaryzacja po stronie prostowanej.
Zastosuj impulsy odblokowujące jednocześnie do obu grup tyrystorów
Nie jest to możliwe, ponieważ nastąpi zwarcie. Dlatego w tym schemacie
może tylko pracować
NI Usenkov. Elektryczny
przejażdżka po niebie jedna grupa tyrystorów UZ1 lub UZ2; inna grupa
tyrystory muszą być zamknięte (impulsy odblokowujące
REMOVED).
Zatem odwracalne konwertery z
oddzielne sterowanie - są to konwertery, w
z których impulsy sterujące docierają tylko do jednego
z zestawów zaworów przewodzących prąd. Impulsy
w tej chwili nie ma sterowania drugim zestawem zaworów
jest zasilany, a jego zawory są zamknięte. Reaktor Lur w obwodzie
może brakować. Zobacz Gorbi243s
Gdy zawory są sterowane osobno, włącza się
tylko grupa tyrystorów, która jest obecnie
musi przewodzić prąd w obciążeniu. Wybór tej grupy
zależy od kierunku ruchu napędu („Do przodu” lub
„Wstecz”) i w trybie pracy napędu: silnik
lub hamowanie regeneracyjne.
NI Usenkov. Elektryczny
przejażdżka po niebie Tabela 1 – Dobór zestawu zaworów
Tryb pracy ED
Silnik
Hamulec
Kierunek
ruch
"Do przodu"
UZ1
UZ2
"Z powrotem"
UZ2
UZ1
W elektronicznych systemach sterowania wybór i włączenie żądanej grupy
tyrystory są produkowane automatycznie w sposób logiczny
urządzenie przełączające zakładów opieki zdrowotnej, którego zasada budowy
pokazany na rysunku.
NI Usenkov. Elektryczny
przejażdżka po niebie Zaakceptujmy kierunek prądu twornika podczas pracy „Do przodu”.
tryb silnika dla pozytywu. Z pozytywnym sygnałem
ustawienie prędkości ωrear odpowiadającej ruchowi
„Naprzód” i
sygnał błędu prędkości, który występuje również w trybie silnikowym
będzie wynosić (ωreset- ω)≥0, sygnał docierający do LCP z regulatora prądu,
będzie miał znak (+). Zgodnie z tym placówka zdrowotna włączy elektronikę
klucz QS1, który dostarcza impulsy odblokowujące do tyrystora
grupa UZ1. Kąt sterowania α1 ustalany jest przez system
automatyczna regulacja w zależności od sygnału wyjściowego
regulator prądu RT. Zarówno SIFU (1), jak i (2) współpracują w ten sposób
że suma kątów jest sumą
α1 + α2 = π.
(1)
Zatem dla grupy tyrystorowej działającej w
w trybie prostowniczym, impulsy odblokowujące podawane są pod kątem α1 =
0…π/2. Jednocześnie SIFU2 generuje impulsy
NI Usenkov. Elektryczny
przejażdżka po niebie sterowanie kątem α2 = π – α1, czyli kątem sterowania,
odpowiedni
falownik
reżim
praca
konwerter UZ2. Jednakże, ponieważ klucz elektroniczny
QS2 jest otwarty, impulsy sterujące do tyrystorów grupy
UZ2 nie dochodzą.
Konwerter UZ2 jest zamknięty, ale
przygotowany do pracy w trybie falownika.
Taki
zasada
uzgodnione
kierownictwo
pozwala na zestawy zaworowe określone przez (1).
koordynować charakterystykę mechaniczną napędu
tryby silnika i hamowania, jak pokazano na
rysunek.
Na
konieczność
hamowanie
prowadzić
sygnał odniesienia prędkości ωset maleje. Błąd wg
znak zmiany prędkości (ωtył - ω)<0, и на входе ЛПУ знак
sygnał zmienia się z (+) na (-), zgodnie z czym
NI Usenkov. Elektryczny
przejażdżka po niebie Styk QS1 jest wyłączony, a styk QS2 jest włączony. Jednakże
Włączenie styku QS2 nie następuje od razu, ale po pewnym czasie
opóźnienie czasowe, które jest niezbędne dla prądu twornika
spadło do zera i tyrystory UZ1 przywróciły blokadę
nieruchomości. Spadek prądu do zera jest kontrolowany przez czujnik prądu DT i
null-organ A (w innych schematach do tego celu
zaworowe czujniki przewodności).
Gdy prąd spadnie do zera, po pewnym opóźnieniu
czas, klawisz QS2 włącza się i konwerter zaczyna pracować
UZ2, już przygotowany do pracy w trybie falownika. Jednostka napędowa
przechodzi w tryb hamowania regeneracyjnego, Czas całkowity
przełączanie grup tyrystorowych wynosi 5 – 10 ms, tj
dopuszczalne w celu zapewnienia wysokiej jakości kontroli urządzeń elektronicznych.
Podczas pracy w trybie silnikowym w kierunku „Wstecz” pojawia się znak
prędkość odniesienia jest ujemna, a wartość bezwzględna
NI Usenkov. Elektryczny
przejażdżka po niebie błędy prędkości |ωtył - ω | pozytywne, więc
wejście LPU otrzymuje sygnał ujemny i włącza się
klucz
QS2.
Pracuje
przetwornik
UZ2
V
tryb prostowniczy. Logiczne zasady działania
Placówki opieki zdrowotnej przedstawiono w tabeli 2.
Stosowane są także inne programy opieki zdrowotnej.
Charakterystyka mechaniczna napędu odwracalnego TP-D
z oddzielnym sterowaniem pokazano na rysunku.
Z prądem ciągłym
opisane są równaniem (1).
kotwice
silnik
Oni
W trybie prądów przerywanych w obszarze małych
wartości momentu obrotowego, liniowość charakterystyki zostaje naruszona.
W nowoczesnych systemach zamkniętych prądowo i prędkościowo
regulacja, dzięki zastosowaniu adaptacji
regulatorów, możliwa jest linearyzacja mechaniczna
charakterystyka EP i N.I.
PriUsenkow.
mały Elektryczny
wartości momentu obrotowego.
przejażdżka po niebie Tabela 2 – Logika działania zakładu opieki zdrowotnej
Podpisać
Podpisać
Podpisać
Dołączony
Pracuje
Tryb
ωtył
|ωtył-ω|
przy wejściu
klucz
praca
Ośrodki opieki zdrowotnej
QS
konwertować
l
+
+
+
QS1
UZ1
+
-
QS2
UZ2
-
+
-
QS2
UZ2
-
-
+
QS1
UZ1
NI Usenkov. Elektryczny
przejażdżka po niebie
napęd elektryczny
A
Silnik
t
Hamulec
Silnik
t
Hamulec Charakterystyka zewnętrzna prostownika
Uda
Ud0
Ud1
0
ID
ja d1
Mam zwarcie
NI Usenkov. Elektryczny
przejażdżka po niebie
7. Napęd elektryczny i automatyka instalacji przemysłowych i kompleksów technologicznych
Realizacja technicznaNI Usenkov. Elektryczny
przejażdżka po niebie NI Usenkov. Elektryczny
przejażdżka po niebie NI Usenkov. Elektryczny
przejażdżka po niebie Zadanie 1. Określ wartości zredukowanych momentów J i Ms w
podnoszenie ładunku (rys. 1), jeśli wiadomo: Jd=3,2 kg m2; Jр.о.=3,6 kg m2;
przełożenie skrzyni biegów p=0,96; Sprawność ciała wykonawczego
(bęben) B=0,94; prędkość kątowa silnika ω=112 rad/s; prędkość
obciążenie podnoszące v=0,2 m/s; masa ładunku m=1000 kg.
Wyjaśnienie.
Zredukowany moment statyczny:
Mc
Fp. o. P. o.
p B D
m g doustnie
p B D
1000 9,81 0,2
19,41H m
0,96 0,94 112
Zredukowany moment bezwładności J:
J
JD J ro
ja p2
M(
2 3,2 3,6
0,2 2
1000
) 3,3 kg m2.
2
D
112
6,14
NI Usenkov. Elektryczny
przejażdżka po niebie Jd, np, ip, s
M, d, Jd
D
PU
Mpo, po, Jpo
RO (b) i schemat 3. Zapoznaj się
MatLab7/Simulink3.
biblioteka
główny
Bloki
V
program
4. Utwórz model blokowy stanowiska laboratoryjnego do wykonania
badania zgodnie z zadanym tematem i podać krótki opis
używane urządzenia funkcjonalne i wirtualne przyrządy pomiarowe
urządzenia.
5. Sprawdź konfigurację wirtualnego laboratorium i wprowadź inicjał
dane do okien dialogowych programu. Sformułuj plan wykonania
eksperyment.
6. Po zakończeniu prac sporządź raport z konstrukcji:
Tytuł pracy i cel pracy;
Opis stanowiska laboratoryjnego;
Analiza oscylogramów zależności doświadczalnych;
Wnioski.
NI Usenkov. Elektryczny
przejażdżka po niebie Praca nr N. Studium napędu elektrycznego wg
konstrukcja „Silnik synchroniczny prostownik-przetwornica”
Model blokowy napędu elektrycznego z silnikiem asynchronicznym
NI Usenkov. Elektryczny
przejażdżka po niebie Wyniki symulacji
NI Usenkov. Elektryczny
przejażdżka po niebie NI Usenkov. Elektryczny
przejażdżka po niebie
Narodowa Akademia Gospodarki Komunalnej w Charkowie
NOTATKI Z WYKŁADÓW
przez dyscyplinę
„Zautomatyzowany napęd elektryczny”
(dla studentów IV roku studiów stacjonarnych i niestacjonarnych na specjalności 6.090603 – „Systemy zasilania energią elektryczną”)
Charków – KHNAGH – 2007
Notatki z wykładów z dyscypliny „Zautomatyzowany napęd elektryczny” (dla studentów IV roku wszystkich form studiów, specjalność 6.090603 – „Systemy zasilania energią elektryczną”). Automatyczny. Garyazha V.N., Fateev V.N. – Charków: KHNAGH, 2007. – 104 strony.
TREŚĆ
| Ogólna charakterystyka notatek z wykładów |
||
| Moduł merytoryczny 1. Zautomatyzowany napęd elektryczny – podstawa rozwoju sił wytwórczych Ukrainy. . . . . . . . . . . . | ||
| Wykład 1. | ||
| 1.1. | Rozwój napędu elektrycznego jako dziedziny nauki i techniki. . . . . . | 6 |
| 1.2. | Zasady projektowania układów sterowania Zautomatyzowany napęd elektryczny. . . . . . . . . . . . . . . . . . . | |
| Wykład 2. | ||
| 1.3. | Klasyfikacja systemów sterowania AED. . . . . . . . . . . . . . . . . . | 13 |
| Moduł treści 2. Mechanika napędu elektrycznego . . . . . . . . . . | 18 |
|
| Wykład 3. | ||
| 2.1. | Przynoszenie momentów i sił oporu, momentów bezwładności. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | |
| Wykład 4. | ||
| 2.2. | Równanie ruchu napędu elektrycznego. . . . . . . . . . . . . . . . . . . . . | 21 |
| Wykład 5. | ||
| 2.3. | Charakterystyka mechaniczna silnika prądu stałego o niezależnym wzbudzeniu. Tryb silnikowy. . . . . . . . . . . | |
| Wykład 6. | ||
| 2.4. | Charakterystyka mechaniczna silnika prądu stałego o niezależnym wzbudzeniu. Tryb hamowania elektrycznego. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | |
| Wykład 7. | ||
| 2.5. | Charakterystyka mechaniczna silnika prądu stałego o wzbudzeniu szeregowym. Tryb silnikowy. . . . . . | |
| Wykład 8. | ||
| 2.6. | Charakterystyka mechaniczna silnika prądu stałego o wzbudzeniu szeregowym. Tryb hamowania elektrycznego. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | |
| Wykład 9. | ||
| 2.7. | Charakterystyki mechaniczne silników asynchronicznych. Tryb silnikowy. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | |
| Wykład 10. | ||
| 2.8. | Charakterystyki mechaniczne silników asynchronicznych. Tryb hamowania elektrycznego. . . . . . . . . . . . . . . . . . .. . . . . | |
| Wykład 11. | ||
| 2.9. | Charakterystyki mechaniczne i elektryczne silników synchronicznych. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | |
| Moduł treści 3. Typowe elementy układów automatycznego sterowania silnikami. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | ||
| Wykład 12. | ||
| 3.1. | Zasady automatycznego sterowania rozruchem i hamowaniem silnika. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | |
| Wykład 13. | ||
| 3.2. | Typowe elementy układów automatycznej regulacji rozruchu DPT. | 77 |
| Wykład 14. | ||
| 3.3. | Typowe elementy obwodów sterujących automatycznym hamowaniem DBT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | |
| Wykład 15. | ||
| 3.4. | Typowe elementy układów automatycznego sterowania rozruchem silników prądu przemiennego. . . . . . . . . . . . . . . . . . . . . . . . . . . . | |
| Wykład 16. | ||
| 3.5. | Typowe elementy obwodów sterowania automatycznym hamowaniem silników prądu przemiennego. . . . . . . . . . . . . . . . | |
| Wykład 17. | ||
| 3.6. | Elektryczne zespoły zabezpieczające silniki i obwody sterujące. . . | 98 |
OGÓLNA CHARAKTERYSTYKA NOTATEK Z WYKŁADÓW
Głównym odbiorcą energii elektrycznej jest zautomatyzowany napęd elektryczny. W krajach uprzemysłowionych ponad 65% wytwarzanej energii elektrycznej jest przetwarzane przez napędy elektryczne na energię mechaniczną. Dlatego rozwój i doskonalenie napędu elektrycznego, który jest podstawą zasilania siły roboczej, przyczynia się do zwiększenia produktywności i zwiększenia wydajności produkcji. Znajomość właściwości i możliwości napędu elektrycznego pozwala inżynierowi elektrykowi zapewnić racjonalne wykorzystanie napędu elektrycznego, uwzględniając zarówno wymagania maszyn technologicznych, jak i systemów zasilania. Przedmiot „Automatyczny napęd elektryczny” realizowany jest w siódmym semestrze czwartego roku studiów. Program specjalności „Elektrotechniczne systemy poboru mocy” przyznaje za to cztery punkty. Wypełnia je sześć modułów merytorycznych, które są realizowane podczas wykładów i zajęć praktycznych, podczas wykonywania prac laboratoryjnych oraz zadań obliczeniowych i graficznych.
Notatki z wykładów zawierają materiał do przestudiowania pierwszych trzech modułów treściowych przedmiotu „Automatyczny napęd elektryczny”. W pierwszym module treści zautomatyzowany napęd elektryczny jest uważany za podstawę rozwoju sił wytwórczych Ukrainy. W drugim badane są właściwości mechaniczne silników, pokazujące możliwości silnika podczas pracy zarówno w trybie silnikowym, jak i w trybie hamowania elektrycznego. Moduł trzeci bada typowe elementy obwodów automatycznego sterowania silnikiem. Bazując na własnościach silników badanych w drugim module, typowe urządzenia zapewniają automatyczny rozruch, hamowanie i nawrót silników w funkcjach czasu, prędkości i prądu z bezpośrednią lub pośrednią regulacją tych wielkości. Strukturalnie typowe jednostki są łączone w formie stanowisk kontrolnych. Udział stacji kontrolnych w ogólnej liczbie napędów elektrycznych stosowanych na Ukrainie przekracza 80%.
Wykład 1.
1.1. Rozwój napędu elektrycznego jako dziedziny nauki i techniki
Od czasów starożytnych ludzie starali się zastąpić ciężką pracę fizyczną, będącą źródłem energii mechanicznej (ME), pracą mechanizmów i maszyn. Wykorzystywał do tego w transporcie i pracach rolniczych, w młynach i systemach nawadniających siłę mięśni zwierząt, energię wiatru i wody, a później energię chemiczną paliwa. Tak powstał napęd – urządzenie składające się z trzech zasadniczo różnych części: silnika (D), mechanicznego urządzenia przekładniowego (MTD) i maszyny technologicznej (TM).
Przeznaczenie silnika: zamiana energii różnego rodzaju na energię mechaniczną. MPU jest przeznaczony do przenoszenia ME z silnika do TM. Nie ma to wpływu na ilość przenoszonego ME (bez uwzględnienia strat), ale może zmieniać jego parametry i, w celu skoordynowania typów ruchu, realizowany jest w postaci paska, łańcucha, przekładni lub innych przekładni mechanicznych.
W maszynie technologicznej ME służy do zmiany właściwości, stanu, kształtu lub położenia przetwarzanego materiału lub produktu.
W nowoczesnych napędach jako źródło ME wykorzystuje się różne silniki elektryczne (EM). Przekształcają energię elektryczną (EE) w energię mechaniczną i dlatego napęd nazywany jest napędem elektrycznym (ED). Jego schemat funkcjonalny pokazano na rys. 1.1. Oprócz wymienionych elementów zawiera sterowaną przetwornicę (P), za pomocą której energia elektryczna dostarczana jest z sieci do silnika elektrycznego.
Zmiana sygnału sterującego konwertera U Na, możesz zmienić ilość EE przychodzącą z sieci do ED. W rezultacie zmieni się ilość ME wytwarzana przez silnik i ilość otrzymywanego HM. To z kolei doprowadzi do zmiany procesu technologicznego, którego efektywność charakteryzuje się zmienną kontrolowaną y(t).
Priorytet w tworzeniu napędu elektrycznego należy do rosyjskich naukowców
B.S. Jacobi i E.H. Lenza, który w 1834 r. wynalazł silnik prądu stałego, a w 1838 r. użył go do napędu łodzi. Jednak niedoskonałość silnika i nieekonomiczne źródło energii elektrycznej (akumulator galwaniczny) nie pozwoliły, aby ten napęd elektryczny znalazł praktyczne zastosowanie.
W połowie XIX wieku próby wykorzystania silników elektrycznych z silnikiem prądu stałego do maszyn drukarskich i tkackich podejmowali naukowcy we Francji i Włoszech. Jednakże system prądu stałego nie zapewnił zadowalającego rozwiązania. Do 1890 roku tylko 5% całkowitej mocy silników napędowych pochodziło z silników elektrycznych.
Powszechne zastosowanie napędów elektrycznych wiąże się z wynalezieniem w latach 1889-1891 przez rosyjskiego inżyniera Doliwa-Dobrowolskiego trójfazowego układu prądu przemiennego i trójfazowego silnika asynchronicznego. Prostota układu trójfazowego, możliwość scentralizowanej produkcji energii elektrycznej i wygoda jej dystrybucji sprawiły, że do 1927 roku już 75% całkowitej mocy silników napędowych stanowiły silniki elektryczne.
Obecnie w wiodących gałęziach przemysłu stosunek mocy zainstalowanej napędów elektrycznych do całkowitej mocy zainstalowanej napędów z silnikami wszystkich typów (cieplnych, hydraulicznych, pneumatycznych) zbliża się do 100%. Decyduje o tym fakt, że silniki elektryczne produkowane są dla różnych mocy (od setnych wata do dziesiątek tysięcy kilowatów) i prędkości obrotowych (od ułamków obrotu wału na minutę do kilkuset tysięcy obrotów na minutę); ED działa w środowisku agresywnych cieczy i gazów w niskich i wysokich temperaturach; dzięki sterowalności konwertera ED z łatwością reguluje postęp procesu technologicznego, zapewniając różne parametry ruchu korpusów roboczych TM; charakteryzuje się wysoką wydajnością, jest niezawodny w działaniu i nie zanieczyszcza środowiska.
Obecnie łączna moc zainstalowana generatorów elektrycznych na Ukrainie przekracza 50 mln kW. Aby rozprowadzić taką moc na wszystkich poziomach napięcia, stworzono sieci elektryczne.
Jednak ze względu na spadek przede wszystkim produkcji przemysłowej, realne zużycie energii elektrycznej na Ukrainie jest zapewnione kosztem połowy określonej mocy. Tak znaczne rezerwy energii stanowią niezawodną podstawę rozwoju sił produkcyjnych Ukrainy, związaną z wprowadzaniem nowych technologii energooszczędnych, wytwarzaniem nowoczesnych produktów high-tech oraz dalszym rozwojem automatyzacji i mechanizacji produkcji. Rozwiązanie wszystkich bez wyjątku tych problemów zapewnia zastosowanie różnych elektrycznych układów napędowych, wzrost zużycia energii elektrycznej przez napęd elektryczny, które w istniejącej strukturze zużycia zbliża się już do 70%.
1.2. Zasady budowy układów sterowania zautomatyzowanych napędów elektrycznych
Charakterystyczną cechą nowoczesnego napędu elektrycznego jest to, że zawiera on sygnał sterujący konwerterem U Na jest tworzony przez specjalne automatyczne urządzenie sterujące (ACD) bez bezpośredniego udziału człowieka. Sterowanie takie nazywa się automatycznym, a napęd elektryczny – automatycznym (AEP).
System sterowania AEP, jak każdy inny automatyczny system sterowania, można uznać za system odbierający i przetwarzający informacje.
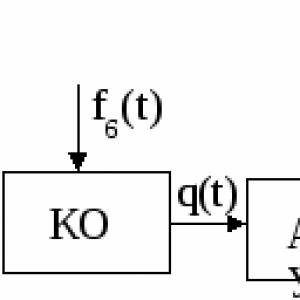
W pierwszym kanale generowana jest informacja o wymaganej wartości kontrolowanej zmiennej q(t)(wpływ ustawienia).
W drugim kanale za pomocą czujników można uzyskać informację o aktualnej wartości kontrolowanej wielkości y(t) lub inne wielkości charakteryzujące EP.
Trzeci kanał może dostarczać informacji o zakłóceniach w systemie sterowania F I (T) jako sygnał X I (T).
W zależności od ilości wykorzystywanych kanałów informacyjnych obowiązują trzy zasady konstruowania systemów sterowania zautomatyzowanymi napędami elektrycznymi:
1) zasada sterowania w pętli otwartej;
2) zasada regulacji w pętli zamkniętej;
3) zasada kontroli kombinowanej.
Rozważmy schematy funkcjonalne systemów sterowania AED.
System sterowania AEP, zbudowany na zasadzie sterowania w pętli otwartej, nazywany jest systemem w pętli otwartej. Wykorzystuje tylko jeden kanał informacji – o wymaganej wartości kontrolowanej zmiennej. q(t). Schemat funkcjonalny takiego układu sterowania przedstawiono na rys. 1.2.
Podobnie jak w poprzednim przypadku, węzeł sumowania na wejściu ACU otrzymuje informację o q(t). Strzałka wskazująca q(t), kierowany jest do niezaciemnionego sektora węzła sumowania. Oznacza to, że sygnał główny wchodzi do jednostki sumującej ze znakiem „+”.
Automat sterujący generuje sygnał sterujący konwerterem U y, wykorzystując jedynie informację o wielkości wpływu odniesienia q(t), który jest dostarczany na wejście ACU z organu dowodzenia (CO). W wyniku tego, że na każdy element schematu funkcjonalnego wpływają zakłócające wpływy F I (T), ilość energii mechanicznej dostarczonej do maszyny technologicznej, a co za tym idzie, skok

Ryż. 1.2 - Schemat funkcjonalny układu sterowania AED w pętli otwartej
operacja technologiczna ulegnie zmianie. W rezultacie rzeczywista wartość kontrolowanej zmiennej y(t) może znacznie różnić się od wymaganej wartości q(t). Różnica pomiędzy wartością wymaganą a rzeczywistą wielkości regulowanej w stanie ustalonym (gdy wielkość kontrolowana y(t) nie zmienia się w czasie) nazywa się błędem sterowania Δx(t)= q(t) – y(t).
Systemy AED z otwartą pętlą stosuje się, jeśli wystąpienie błędu sterowania nie prowadzi do znacznych strat w technologii (zmniejszona produktywność TM, obniżona jakość produktu itp.)
W przeciwnym wypadku, gdy wystąpienie błędu sterowania znacząco obniża efektywność procesu technologicznego, do budowy układu sterowania AED wykorzystuje się zasadę sterowania w pętli zamkniętej. Taki system nazywa się zamkniętym.
Wykorzystuje dwa kanały informacji: informację o wymaganej wartości kontrolowanej zmiennej q(t) dodawana jest informacja o aktualnej wartości kontrolowanej zmiennej y(t). Schemat funkcjonalny takiego układu sterowania pokazano na rys. 1.3.
Informacja o aktualnej wartości kontrolowanej zmiennej y(t) jest podawany do jednostki sumującej za pomocą głównej pętli sprzężenia zwrotnego (GOS). Mówią, że GOS „zamyka” system sterowania, łącząc jego wyjście z wejściem.
Strzałka wskazująca y(t), kierowany jest do ciemnego sektora węzła sumującego, tj. Sygnał GOS wchodzi do jednostki sumującej ze znakiem „–” i dlatego GOS nazywany jest ujemnym sprzężeniem zwrotnym.

Ryż. 1.3 - Schemat funkcjonalny układu sterowania elektrowni jądrowej w pętli zamkniętej.
W węźle sumowania w wyniku algebraicznego (z uwzględnieniem znaku) dodawania sygnałów q(t) I y(t) określa się wielkość i znak błędu sterowania Δx(t)= +q(t) – y(t). Sygnał błędu wysyłany jest na wejście ACU. Dzięki temu ACU generując sygnał sterujący dla przetwornika P na podstawie informacji o rzeczywistej zależności pomiędzy zadaną a rzeczywistą wartością zmiennej sterowanej, zapewnia dostarczenie takiej ilości EE do ED i do układu technologicznego maszynę ME, aby błąd sterowania można było zredukować do akceptowalnej wartości lub zredukować do zera.
Oprócz GOS system sterowania może mieć różne pętle sprzężenia zwrotnego (FOC) wewnętrzne w GOS. Kontrolują parametry pośrednie systemu, co poprawia jakość procesu sterowania. Układ zawierający tylko GOS nazywa się jednoobwodowym, a taki, który oprócz GOS ma także VOS, nazywa się wieloobwodowym.
W systemie zbudowanym na zasadzie kombinowanej łączone są dwie struktury - zamknięta i otwarta. Do systemu zamkniętego, który jest głównym, dodawana jest struktura o otwartej pętli za pośrednictwem trzeciego kanału informacyjnego X 1 (T) o głównym zakłócającym wpływie F 1 (T). Schemat funkcjonalny systemu pokazano na rysunku 1.4.
Głównym z nich jest wpływ zakłócający, który ma największą składową w wartości błędu regulacji.

Ryż. 1.4 - Schemat funkcjonalny połączonego układu sterowania elektrownią jądrową
Na ryc. 1.4 jako główny, przyjmuje się zakłócający wpływ F 1 (T). Steruje nim element pośredni (IE) i informacja o nim X 1 (T) podawany do jednostki sumującej. Dzięki temu ACU wprowadza do sygnału sterującego konwertera składnik, który kompensuje ten wpływ F 1 (T) na proces technologiczny i zmniejsza ilość błędów sterowania. Wpływ innych czynników zakłócających na błąd jest eliminowany przez główny system zamknięty.
Rozważane przykłady pozwalają zdefiniować pojęcie „zautomatyzowanego napędu elektrycznego”.
Zautomatyzowany napęd elektryczny to układ elektromechaniczny, w którym w pierwszej kolejności energia elektryczna zamieniana jest na energię mechaniczną. Dzięki tej energii wprawiane są w ruch części robocze maszyny technologicznej. Po drugie, proces konwersji energii jest kontrolowany w celu zapewnienia wymaganych trybów pracy TM w stanie ustalonym i przejściowym.
Wykład 2.
1.3. Klasyfikacja systemów sterowania AED
Klasyfikacji układów sterowania AED można dokonać według wielu kryteriów: ze względu na rodzaj prądu silnika systemy dzieli się na prąd przemienny i prąd stały. Według rodzaju sygnałów informacyjnych i sterujących - systemy ciągłe i dyskretne. W zależności od charakteru równań opisujących procesy sterowania - układy liniowe i nieliniowe. Często dzieli się je ze względu na rodzaj przetwornicy lub wyposażenia głównego: układ – generator prądu stałego – silnik (G-D); układ - przetwornica tyrystorowa - silnik (TP-D); układ - tyrystorowa przetwornica częstotliwości - silnik (TFC-D) itp.
Jednak najbardziej rozpowszechniona klasyfikacja systemów sterowania AED opiera się na funkcjach, jakie pełnią w procesach technologicznych. Jest pięć takich funkcji.
1. Układy sterowania procesami rozruchu, hamowania i odwrotu. Wśród nich z kolei można wyróżnić trzy grupy systemów.
Systemy pierwszej grupy mają charakter otwarty. Stosowane są w napędach elektrycznych z silnikami asynchronicznymi z wirnikiem klatkowym. Przetwornica składa się z urządzenia przełączającego moc (SPU), które łączy silnik bezpośrednio z siecią. Cały sprzęt sterujący jest sterowany przekaźnikiem (kontaktowym lub bezkontaktowym).
Systemy sterowania drugiej grupy są również w pętli otwartej. Stosowane są w napędach elektrycznych z silnikami prądu stałego i silnikami asynchronicznymi z uzwojonym wirnikiem, mają bardziej złożoną budowę SPU, które zapewniają stopniowe przełączanie rezystorów lub innych elementów w obwodach mocy silnika. Zapewniają kontrolę automatycznego rozruchu i hamowania, co ogranicza prąd i moment obrotowy silnika. Dzięki ręcznemu sterowaniu SPU możliwa jest regulacja prędkości w niewielkim zakresie.
Układy trzeciej grupy przeznaczone są do realizacji optymalnych procesów rozruchu, hamowania i cofania. Przez optymalne rozumie się w tym przypadku procesy przejściowe zachodzące w minimalnym czasie. Zapewnia to utrzymanie momentu obrotowego silnika na dopuszczalnej wartości podczas rozruchu i hamowania.
Układy takie stosowane są w napędach elektrycznych o pracy przerywanej, gdy czas stanu ustalonego jest krótki lub w ogóle nie występuje. Dlatego wystąpienie błędu sterowania nie będzie prowadzić do strat w technologii, a system może nie posiadać GOS.
Zamknięta pętla sterowania w takim układzie tworzy się w wyniku ujemnego sprzężenia zwrotnego od momentu obrotowego (prądu) silnika. Na ryc. 1.4 jest to pokazane jako BOS. Zmienną sterowaną jest w tym przypadku moment obrotowy silnika. Dlatego ACU generuje sygnał sterujący P w taki sposób, aby podczas procesu rozruchu i hamowania moment obrotowy utrzymywał się na wymaganym poziomie lub zmieniał się w czasie zgodnie z wymaganym prawem.
2. Układy utrzymywania stałej wartości zadanej wielkości regulowanej (układy stabilizacji). Wielkości regulowane to te, które charakteryzują ruch korpusu roboczego TM i wału silnika - prędkość, przyspieszenie, moment obrotowy, moc itp.
Układy stabilizacji zbudowane są na zasadzie zamkniętej i mogą mieć schemat funkcjonalny pokazany na ryc. 1.4. W takim układzie sygnał napędowy q(t)=stała. Dlatego zmniejszenie kontrolowanej zmiennej y(t), spowodowane pojawieniem się zakłócającego wpływu F 1 (T), spowoduje wzrost sygnału błędu sterowania na wejściu ACU. Automat sterujący generuje sygnał sterujący przekształtnikiem w zależności od zastosowanego w nim prawa sterowania (rodzaju regulatora). W przypadku prawa sterowania proporcjonalnego jako regulator wykorzystuje się łącze proporcjonalne (wzmacniające) o wzmocnieniu większym od jedności (P – regulator). Dlatego wraz ze wzrostem sygnału błąd na wejściu regulatora P spowoduje również zwiększenie sygnału sterującego konwertera. W rezultacie ilość EE i ME wzrośnie, co doprowadzi do wzrostu y(t) i zmniejszenie błędu sterowania. Nie można jednak tego całkowicie skompensować, ponieważ w tym przypadku sygnały na wejściu i wyjściu regulatora P będą równe zeru, do silnika nie będzie dostarczana żadna energia elektryczna, a proces technologiczny zostanie zatrzymany.
Układ stabilizacji, w którym błąd sterowania nie jest redukowany do zera, a jedynie maleje do akceptowalnej wartości, nazywa się statycznym.
W przypadku prawa sterowania proporcjonalnie-całkującego regulator składa się z dwóch ogniw połączonych równolegle - proporcjonalnego i całkującego (P-I - regulator). Sygnał błędu dociera jednocześnie na wejście obu łączy. Część proporcjonalna regulatora, podobnie jak w poprzednim przypadku, wzmocni sygnał błędu. Część całkująca sterownika będzie sumować sygnał błędu, tj. jego sygnał wyjściowy będzie wzrastał, dopóki na wejściu sterownika będzie obecny sygnał błędu. Ponieważ sygnał wyjściowy sterownika (sygnał sterujący przetwornika) jest sumą sygnałów wyjściowych części proporcjonalnej i całkującej, to dopóki na wejściu sterownika występuje sygnał błędu, jego sygnał wyjściowy będzie wzrastał. W rezultacie liczba EE i ME w systemie wzrośnie, a błąd sterowania zmniejszy się. Gdy sygnał błędu na wejściu sterownika stanie się równy zeru, sygnał na wyjściu regulatora będzie większy od zera, gdyż część całkowa sterownika po zaniku sygnału na wejściu zapamiętuje sumę wartość sygnału wyjściowego. Do silnika zostanie dostarczony EE, a proces technologiczny będzie kontynuowany.
Układ stabilizacji, w którym błąd sterowania jest zredukowany do zera, nazywa się astatycznym.
W przypadku prawa sterowania proporcjonalnie-całkująco-różnicowego łącze różniczkujące (P-I-D) jest włączane równolegle do ogniw P, I. (P - I - D - regulator).
Sygnał wyjściowy części różnicowej jest wprost proporcjonalny do szybkości zmian sygnału błędu sterowania. Sumując się z sygnałami P, I części regulatora, dodatkowo zwiększa sygnał sterujący przetwornicą i ilość energii elektrycznej dostarczanej do silnika. Pomaga to zredukować błąd sterowania dynamicznego, tj. różnica między wymaganą a rzeczywistą wartością regulowanej zmiennej podczas stanu przejściowego w systemie.
Układy stabilizacji znajdują zastosowanie w przypadkach, gdy konieczne jest utrzymanie szczególnie precyzyjnego parametru technicznego procesu, a także przy regulacji prędkości obrotowej silnika w szerokim zakresie.
Aby kształtować procesy rozruchu i hamowania, układ stabilizacji może mieć wewnętrzne sprzężenie zwrotne na temat momentu obrotowego silnika (BOS na ryc. 1.4).
Otwarty kanał sterowania oparty na głównym zakłóceniu zmniejsza błąd sterowania w układach statycznych.
3. Systemy śledzenia. Podobnie jak systemy stabilizacji, są zbudowane na zasadzie zamkniętej. Jednak sygnał jazdy q(t) w nich rzeczywista wartość kontrolowanej zmiennej zmienia się zgodnie z prawem losowym y(t) musi powtórzyć (prześledzić) to prawo.
Stosowane są w maszynach technologicznych, które wymagają, aby przy obróceniu wału wejściowego pod dowolnym kątem wał wyjściowy „podążał” za wałem wejściowym i obracał się pod tym samym kątem.
Kiedy położenie wałów pokrywa się q(t) = y(t) a błąd sterowania wynosi zero. Podczas zmiany położenia wału wejściowego q(t) ≠ y(t). Na wejściu ACU pojawia się sygnał błędu, przetwornica dostarcza energię elektryczną do silnika, a wał wyjściowy będzie się obracał, aż zajmie pozycję wejścia.
4. Systemy sterowania programowego. Stosowane są w maszynach technologicznych z kilkoma napędami elektrycznymi. Napędy te mogą być zbudowane na zasadzie otwartej lub zamkniętej. Łączy je urządzenie zmieniające wartość zadaną wielkości regulowanej każdego napędu elektrycznego według zadanego programu. W tym przypadku silniki poszczególnych części roboczych uruchamiają się automatycznie, pracują z określonymi prędkościami obrotowymi lub są rewersowane, a ruchome części robocze maszyny technologicznej nie kolidują ze sobą.
5. Systemy adaptacyjne. Stosuje się je w przypadkach, gdy system zbudowany na zasadzie zamkniętej, na skutek nieprzewidzianych zmian wpływów zakłócających, nie jest w stanie spełnić swojej funkcji, np. stabilizacji zmiennej kontrolowanej.
Aby zapewnić adaptację (adaptowalność) systemu zamkniętego, do jego składu wprowadza się dodatkowy obwód, którego podstawą jest urządzenie liczące. Kontroluje ilość q(t), y(t), niepokojące wpływy F I (T), analizuje działanie układu stabilizacji i określa zmiany parametrów lub struktury jednostki sterującej niezbędne do adaptacji.
Wykład 3.
2.1. Przynoszenie momentów i sił oporu, momentów bezwładności i mas bezwładnościowych
Część mechaniczna napędu elektrycznego obejmuje część obrotową silnika, mechaniczne urządzenie przekładniowe oraz element roboczy maszyny technologicznej.
Obracająca się część silnika (twornica lub wirnik) służy jako źródło energii mechanicznej.
Za pomocą MPU ruch obrotowy silnika przekształca się w ruch postępowy elementu roboczego TM lub zmieniając stosunek prędkości wału wejściowego i wyjściowego MPU, prędkości obrotowe silnika i elementy robocze są skoordynowane. Jako MPU można zastosować przekładnie cylindryczne i ślimakowe, przekładnie planetarne, parę śrub i nakrętek, przekładnie korbowe, zębatkowe, pasowe i łańcuchowe.
Korpus roboczy TM jest konsumentem energii mechanicznej, którą przekształca w użyteczną pracę. Części robocze obejmują wrzeciono tokarki lub wiertarki, ruchomą część przenośnika, łyżkę koparki, kabinę windy, śmigło statku itp.
Elementy części mechanicznej napędu elektrycznego są ze sobą połączone i tworzą łańcuch kinematyczny, którego każdy element ma własną prędkość ruchu, charakteryzującą się momentem bezwładności lub masą bezwładności, a także zbiorem momentów lub działające na nią siły. Ruch mechaniczny któregokolwiek z elementów określa drugie prawo Newtona. Dla elementu obracającego się wokół ustalonej osi równanie ruchu ma postać:

Gdzie  – wektorowa suma momentów działających na element;
– wektorowa suma momentów działających na element;
J– moment bezwładności elementu;
 – przyspieszenie kątowe elementu wirującego.
– przyspieszenie kątowe elementu wirującego.
Dla elementu poruszającego się translacyjnie równanie ruchu ma postać:
 ,
,
Gdzie  – wektorowa suma sił działających na element;
– wektorowa suma sił działających na element;
M– masa bezwładności elementu;
 – przyspieszenie liniowe elementu poruszającego się translacyjnie.
– przyspieszenie liniowe elementu poruszającego się translacyjnie.
Korzystając z tych równań, można uwzględnić interakcję dowolnego elementu z resztą łańcucha kinematycznego. Można to wygodnie osiągnąć poprzez wprowadzenie momentów i sił, a także momentów bezwładności i mas bezwładności. W wyniku tej operacji (redukcji) rzeczywisty schemat kinematyczny zostaje zastąpiony wyliczonym, energetycznie równoważnym schematem, którego podstawą jest element, którego ruch jest uwzględniany. Z reguły tym elementem jest wał silnika M. Pozwala to najpełniej poznać charakter ruchu napędu elektrycznego i jego tryb pracy. Znając parametry schematu kinematycznego, można określić rodzaj ruchu korpusu roboczego maszyny technologicznej.
Redukcja momentów oporu z jednej osi obrotu na drugą odbywa się na podstawie bilansu mocy w układzie.
Podczas operacji technologicznej korpus roboczy obraca się wokół własnej osi z określoną prędkością ω M i wywołanie momentu oporu M cm, zużywa energię R M =M cm ω M. Straty mocy w MPU uwzględnia się poprzez podzielenie wartości R M na efektywność transfery η P. Moc tę zapewnia silnik obracający się z określoną prędkością ω i rozwijający się moment M Z, równy momentowi oporu zredukowanemu do osi obrotu wału silnika M cm. Z równości potęg otrzymujemy:
 .
.
Następnie wyrażenie określające zredukowany moment oporu M Z ma postać:
 ,
,
Gdzie  – Przełożenie MPU.
– Przełożenie MPU.
Sprowadzenie sił oporu odbywa się w podobny sposób. Jeżeli prędkość ruchu translacyjnego korpusu roboczego TM jest równa υ M a podczas operacji technologicznej powstaje siła oporu F cm, następnie biorąc pod uwagę efektywność Równanie bilansu mocy MPU będzie miało postać:
 .
.
Zmniejszony moment oporu M Z będzie równe:
 ,
,
Gdzie  – Promień redukcji MPU.
– Promień redukcji MPU.
Każdy z obracających się elementów schematu kinematycznego charakteryzuje się momentem bezwładności J і . Redukcja momentów bezwładności do jednej osi obrotu polega na tym, że całkowita rezerwa energii kinetycznej ruchomych części napędu, w odniesieniu do jednej osi, pozostaje niezmieniona. W obecności części wirujących z momentami bezwładności J D , J 1 , J 2 , …J N i prędkości kątowe ω, ω 1 , ω 2 , … ω N możliwe jest zastąpienie ich dynamicznego działania działaniem jednego elementu posiadającego moment bezwładności J i obraca się z dużą prędkością ω .
W tym przypadku możemy napisać równanie bilansu energii kinetycznej:
 .
.
Całkowity moment bezwładności zredukowany do wału silnika będzie równy:
 ,
,
Gdzie J D– moment bezwładności wirnika (twornicy) M;
J 1 , J 2 , …J N– momenty bezwładności pozostałych elementów układu kinematycznego.
Przynoszenie mas bezwładnościowych M, poruszając się translacyjnie, odbywa się również na podstawie równości energii kinetycznej:
 ,
,
Stąd moment bezwładności zredukowany do wału silnika będzie równy:
 .
.
W wyniku przeprowadzenia operacji redukcji rzeczywisty schemat kinematyczny zostaje zastąpiony obliczonym, energetycznie równoważnym schematem. Jest to ciało obracające się wokół stałej osi. Oś ta jest osią obrotu wału silnika. Działa na niego moment obrotowy silnika M i zmniejszony moment oporu M Z. Korpus obraca się z prędkością silnika ω i ma zmniejszony moment bezwładności J.
W teorii napędów elektrycznych taki schemat konstrukcyjny nazywa się jednomasowym układem mechanicznym. Odpowiada mechanicznej części AED z całkowicie sztywnymi elementami i bez szczelin.
AUTOMATYCZNY NAPĘD ELEKTRYCZNY
Kurs wykładów dla studentów specjalności
„Maszyny i narzędzia do obróbki metalu”
ROZDZIAŁ 1 PYTANIA OGÓLNE DO AEP. MECHANIKA AEP
1.1. Podstawowe pojęcia i definicje
1.1. Charakterystyki mechaniczne maszyn roboczych i silników elektrycznych
1.2. Charakterystyka mechaniczna DPT
1.3. Charakterystyka mechaniczna IM
1.4. Charakterystyka mechaniczna SD
ROZDZIAŁ 2 METODY OBLICZANIA MOCY I DOBORU SILNIKÓW ELEKTRYCZNYCH
2.1. Siły i momenty działające w ED
2.2. Przenoszenie momentów oporu i bezwładności na wał silnika
2.3. Uwagi ogólne . Ogrzewanie i chłodzenie silnika
2.4. Metoda średniej straty . Metody równoważne.
2.5. Seria silników elektrycznych stosowanych w obrabiarkach
ROZDZIAŁ 3 ELEMENTY ZASILANIA I CZĘŚCI REGULACYJNEJ PDS
Klasyfikacja urządzeń elektronicznych SEP
3.1. Przetwornice tyrystorowe
3.2. Przetwornice tranzystorowe
3.3. Typowe czujniki
3.4. Typowe elektroniczne zespoły zabezpieczające
3.5. Typowe regulatory
ROZDZIAŁ 4 TYPOWY SEP MASZYN DO CIĘCIA METALI
4.1. Zasady konstruowania standardowych SEP
4.2. Jednoprzewodowy DC PDS
4.3. SPR EP DC ze sterowaniem jednostrefowym
4.4. SPR EP DC ze sterowaniem dwustrefowym
4,5. AC PDS z AIN i AIT (obwody z systemem operacyjnym dla prędkości i prądu)
4.6. Systemy stabilizacji parametrów technologicznych przy cięciu metali
ROZDZIAŁ 5ŚLEDZENIE WRZESIEŃ MASZYN DO CIĘCIA METALI
5.1. Typowe konstrukcje śledzących urządzeń elektronicznych i ich elementów
5.2. Śledzenie ED z podrzędną regulacją parametrów
5.3. Śledzenie elektronicznego podawania frezarek kopiujących
LITERATURA
1. Zautomatyzowany napęd elektryczny standardowych mechanizmów produkcyjnych i kompleksów technologicznych: Podręcznik dla uniwersytetów / M.P. Biełow, V.A. Nowikow, L.N. Powody. – M.: Centrum Wydawnicze „Akademia”, 2004. – 576 s.
2. Inżynieria napędów elektrycznych i układów automatyki: podręcznik. pomoc dla studentów wyższy podręcznik instytucje / M.P. Biełow, O.I. Zementow, A.E. Kozyaruk i wsp.; pod. wyd. VA Novikova, L.M. Czernigow. – M.: Centrum Wydawnicze „Akademia”, 2006. – 368 s.
3. Kovchin SA, Sabinin Yu.A. Teoria napędu elektrycznego: Podręcznik dla uniwersytetów. – St. Petersburg: Energoatomizdat, 2000. – 496 s.
4. Szestakow V.M., Dmitriev B.F., Repkin V.I. Urządzenia elektroniczne układów automatycznego sterowania: Podręcznik. – Petersburg: Wydawnictwo. Państwowy Uniwersytet Techniczny w Leningradzie, 1991.
ROZDZIAŁ 1. ZAGADNIENIA OGÓLNE AEP. MECHANIKA AEP.
1.1. Podstawowe pojęcia i definicje
Istnieją różne rodzaje napędów, jednak ze względu na efektywne magazynowanie, łatwość przesyłu, właściwości sumowania i podzielności, energia elektryczna jest coraz szerzej stosowana w porównaniu do innych form energii. Obecnie najczęściej stosowanym jest zautomatyzowany napęd elektryczny (GOST R 50369-92).
Napęd elektryczny (ED) to układ elektromechaniczny przeznaczony do wprawiania w ruch części roboczych maszyn, celowego sterowania tymi procesami i składający się z przekładni, silnika elektrycznego, przetwornika, urządzeń sterujących i informacyjnych.
Urządzenie do przenoszenia przeznaczony do przekształcania form ruchu i przenoszenia energii mechanicznej z urządzenia napędowego na części robocze maszyny.
Urządzenie napędowe przetwarza energię elektryczną na energię mechaniczną i tworzy wraz z urządzeniem transmisyjnym określone formy ruchu ciał roboczych.
Urządzenie konwertujące służy do połączenia PDS ze źródłem energii elektrycznej (sieć przemysłowa lub autonomiczna), w celu konwersji jednej formy energii elektrycznej na inną (na przykład prostowanie prądu przemiennego).
Urządzenia sterujące i informacyjne mają na celu tworzenie określonych praw sterowania przepływem energii i ruchem części roboczych maszyn.
Klasyfikacja EP
1. Według celu: a) główny (na przykład ruch główny);
b) pomocnicze (na przykład pasze).
2. Według rodzaju prądu pobieranego przez silnik: a) prąd stały;
b) prąd przemienny.
3. Według rodzaju wyłączników mocy: a) tyrystor;
b) tranzystor;
c) mikroprocesor
4. Według rodzaju automatycznego systemu sterowania (ACS):
a) analogowe (ciągłe) elektroniczne systemy transmisji (EPS);
b) cyfrowe (dyskretne) elektroniczne systemy transmisji;
c) cyfrowo-analogowy SES;
d) liniowy lub nieliniowy SEP;
e) statyczny lub astatyczny SEP;
5. Według pełnionych funkcji:
a) zgrubna kontrola prędkości (otwarty PDS);
b) precyzyjna kontrola prędkości (zamknięty PDS);
c) śledzenie dowolnie zmieniających się sygnałów wejściowych (systemy śledzące);
d) programowe przetwarzanie zadań (SEP z kontrolą programu);
e) połączona regulacja parametrów (wielosilnikowy i połączony PDS);
Funkcje a)-e) uważa się za podstawowe. Dodatkowe funkcje obejmują: alarm (diagnostyka) i zabezpieczenie elektroniczne.
Charakterystyki mechaniczne silników asynchronicznych (IM)
1) Charakterystyka mechaniczna 3-fazowego IM
Asynchroniczny silnik elektryczny ma trójfazowe uzwojenie stojana. Po przyłożeniu do niego napięcia trójfazowego o częstotliwości , powstaje pole magnetyczne, wirujące z prędkością kątową , gdzie jest liczbą 10
pary biegunów stojana (określone przez rozmieszczenie uzwojeń).
Wirnik IM jest najczęściej klatką wiewiórczą („klatką wiewiórczą”). W maszynach podnoszących i transportowych stosuje się wirnik uzwojony, w którym uzwojenie wirnika jest wyprowadzone poprzez pierścienie stykowe na nieruchomą podstawę i połączone z dodatkowymi oporami.
Obecnie do sterowania większością obiektów domyślnie używany jest komunikator.
Przy opisie IM parametry elektryczne silnika mają wskaźniki: 1 – stojan; 2 – wirnik.
Gdy R 1 = 0, charakterystykę mechaniczną opisuje wzór
 , gdzie jest moment krytyczny; - przesuwanie.
, gdzie jest moment krytyczny; - przesuwanie.

1 – naturalny ();
1" – rewers (zamienione są dwie z trzech faz);
4 – IM z uzwojonym wirnikiem, .
tryby hamowania
5 – hamowanie dynamiczne: do uzwojenia stojana zostanie podany prąd stały, następnie wirujący wirnik zostanie wyhamowany;
6 – przeciwprąd (rewers): (dwie fazy zamieniają się miejscami);
7 – rekuperacja, odwrócenie momentu obrotowego. Hamowanie do zera wymaga falownika, który w sposób ciągły zmniejsza.
Uruchamianie IM: Aby ograniczyć prądy rozruchowe IM dużej mocy lub uzyskać płynny start napędu asynchronicznego, należy zastosować:
1) włączenie rezystancji aktywnych lub indukcyjnych do obwodu stojana, które są wyprowadzane na końcu rozruchu;
2) rozruch „częstotliwości” poprzez przetwornicę płynnie zmieniającą częstotliwość zasilania silnika;
3) zacząć od uzwojonego wirnika;
4) rozruch reaktora – włączenie dławików indukcyjnych do obwodu wirnika. Na początku rozruchu częstotliwość prądu w wirniku jest zbliżona do częstotliwości sieci, reaktancja indukcyjna jest duża i ogranicza prąd rozruchowy.
2) Charakterystyka mechaniczna dwufazowego IM

Dostępne w mocach do 1 kW. Może być wykonany z wirnikiem pełnym lub pustym. OV, OU – odpowiednio uzwojenia wzbudzenia i sterowania; Aby przesunąć fazy, kondensator o pojemności 1-2 μF jest podłączony szeregowo do obwodu OF na każde 100 W.
Z załączeniem jednofazowym.
Uwaga: przy kontroli częstotliwości charakterystyki staną się liniowe i równoległe do siebie, przy kontroli fazy - tylko liniowe.

Uwagi ogólne
1) Zadanie polega na prawidłowym doborze silnika elektrycznego do zadanego mechanizmu (jednostki), biorąc pod uwagę dopuszczalne nagrzewanie oraz przeciążenia prądowe i momentowe.
Straty dzielą się na:
Stałe - mechaniczne i stalowe - nie zależą od prądu silnika;
Zmienne - w miedzi - są funkcją kwadratu prądu silnika.
Związek między stratami a wydajnością:
 , Gdzie R– moc na wale; P 1 – pobór mocy.
, Gdzie R– moc na wale; P 1 – pobór mocy.
2) Nagrzewanie i chłodzenie silnika elektrycznego podczas długotrwałej pracy.
![]() - ilość ciepła wydzielanego (wytwarzanego) przez silnik elektryczny;
- ilość ciepła wydzielanego (wytwarzanego) przez silnik elektryczny;
Pojemność cieplna silnika;
![]() - przenikanie ciepła.
- przenikanie ciepła.
Przy stałej temperaturze otoczenia temperatura silnika wzrośnie zgodnie z prawem  , gdzie jest stałą czasu ogrzewania, s; , stopień.
, gdzie jest stałą czasu ogrzewania, s; , stopień.

3) Tryby pracy silnika
a) długoterminowe (S1)

b) krótkoterminowe (S2)

c) przerywany (S3, S4)

WŁ. czas trwania  , gdzie jest cykl pracy;
, gdzie jest cykl pracy;
standaryzowane PV% = 15, 25, 40, 60%
4) Klasy izolacji i dopuszczalne temperatury pracy silników.
Zgodnie z międzynarodowymi normami wyróżnia się następujące klasy izolacji:
W silnikach ogólnego przeznaczenia stosuje się izolację klasy B i F.
5) Projektowanie klimatyczne maszyn elektrycznych
6) Stopnie ochrony maszyn elektrycznych (GOST 14254-80 i GOST 17494-72)
Ogólne oznaczenie rodzaju ochrony (ochrona międzynarodowa) to IP, gdzie
1. cyfra: stopień ochrony personelu przed kontaktem z ruchomymi częściami sprzętu i przedostaniem się stałych ciał obcych do skorupy;
2. cyfra: stopień ochrony przed przedostawaniem się wody do wnętrza urządzenia.
| IP | Cyfra 1 | Cyfra 2 | |
| Ochrona przed dotykiem | Ochrona przed ciałami obcymi | Ochrona wody | |
| Niechroniony | Niechroniony | Niechroniony | |
| Od dotknięcia dużego obszaru (ręką) | Z obiektów większych niż 50 mm | Od kropli wody spadających pionowo | |
| Od dotykania palcami | Z obiektów większych niż 12 mm | Od pionowo opadających kropli i rozprysków pod kątem do 15 0 do prostopadłej | |
| Od dotknięcia przedmiotów lub drutów o średnicy większej niż 2,5 mm *) | Z obiektów większych niż 2,5 mm | Od pionowo opadających kropli i rozprysków pod kątem do 60 0 do prostopadłej | |
| Od dotknięcia przedmiotów lub drutów o średnicy większej niż 1 mm *) | Z małych twardych przedmiotów (więcej niż 1 mm) | Od kropel wody ze wszystkich stron | |
| Od dotyku jakąkolwiek pomocą *) | Od kurzu osiadającego wewnątrz | Od strumieni wody ze wszystkich stron | |
| Od dotyku przez wszelkiego rodzaju pomoce | Od jakiegokolwiek kurzu | Od fal wody | |
| - | - | Ochrona po zanurzeniu w wodzie | |
| - | - | Ochrona przed długotrwałym zanurzeniem w wodzie |
*) Nie dotyczy wentylatorów maszyn elektrycznych
Standardowy stopień ochrony silnika to IP 54. Na zamówienie zapewniamy podwyższony stopień ochrony IP 55 i IP 65.
Napędy pracujące z dużą liczbą przełączników
Napędy z dodatkową masą bezwładnościową (wirnik inercyjny)
Napędy sterowane przetwornicą o zakresach regulacji powyżej 1:20
Napędy sterowane przez konwerter, które utrzymują znamionowy moment obrotowy przy niskiej prędkości lub w pozycji zatrzymania
Metody obliczania mocy
Doboru mocy silnika przy obciążeniu stacjonarnym dokonuje się według stanu (najbliższego większego w katalogu). W tym przypadku silnik się przegrzał.
Rozważmy wybór mocy silnika przy zmiennym obciążeniu:
1. Metoda średniej straty (metoda bezpośrednia).
Metoda opiera się na wykresie obciążenia. Rozważmy bezpośrednią metodę rozliczania strat w silniku

1) Średnią moc na wale silnika oblicza się ze wzoru
 ,
,  Prawo Joule’a-Lenza
Prawo Joule’a-Lenza ![]()
Straty silnika są proporcjonalne do mocy czynnej. Zatem o nagrzewaniu silnika decyduje nie , ale . Rodzi to problem kalkulacji strat.
2) wybór mocy silnika,
Gdzie k= 1,2...1,3 – współczynnik bezpieczeństwa uwzględniający proporcjonalność strat do kwadratu prądu;
3) Obliczanie strat przy różnych obciążeniach za pomocą krzywych katalogowych według wzoru 

4) określa się średnie straty na cykl  ;
;
5) dobór mocy silnika w zależności od stanu, w którym  - silnik się rozgrzał;
- silnik się rozgrzał;
6) Wybrany silnik należy sprawdzić pod kątem przeciążenia i warunków rozruchu
DPT: ![]() , ;
, ;
PIEKŁO: ![]() ,
, ![]()
Metody równoważne
Metody te są pośrednie, ponieważ pośrednio uwzględniają straty w maszynie elektrycznej.
1) Metoda prądu równoważnego.
Obliczany jest pewien prąd zastępczy, z którego straty są równoważne stratom rzeczywistym przy zmiennym obciążeniu, ponieważ

2) Metoda momentów zastępczych ![]() przy Ф-const
przy Ф-const
 ; - silnik się rozgrzał.
; - silnik się rozgrzał.
3) Metoda mocy zastępczej dla Ф-const, -const
 ; - silnik się rozgrzał.
; - silnik się rozgrzał.
Wybrany silnik należy następnie sprawdzić pod kątem przeciążenia i warunków rozruchu.
Najszersze zastosowanie dotyczy metody prądu zastępczego, najwęższe metody mocy zastępczej. Równoważne metody prądowe i mocowe nie mają zastosowania przy regulacji dwustrefowej, ponieważ zawierają bloki produktów w formułach, ![]() . Bardziej dokładna jest metoda średniej straty (metoda bezpośrednia).
. Bardziej dokładna jest metoda średniej straty (metoda bezpośrednia).
Uwaga: W trybie przerywanym silnik jest wybierany na podstawie warunku.
 ;
;
Tutaj praktycznie nie stosuje się metod równoważnego momentu obrotowego i prądu. Jeżeli obciążenie nie jest takie samo w różnych cyklach, należy obliczyć średni cykl pracy, biorąc pod uwagę N cykle.
Przetwornice tyrystorowe
Zalety: a) niezawodność; b) niska masa; c) mała moc sterowania; d) wysoka wydajność; d) wysoka wydajność (0,95-0,97)
Wady: a) nie wytrzymuje przeciążeń; b) redukcja cos przy małych obciążeniach; c) generowanie w sieci oscylacji wyższych harmonicznych podczas przełączania zaworów (w celu ich zwalczania włącza się TOP)
1. Schematy TP i metody sterowania:
1) Zerowy obwód napędu odwracalnego
m=3 – faza konwertera. Zalety: mniej tyrystorów. Stosowany w napędach małej mocy.

2) Obwód mostkowy do prostowania napędu odwracalnego (obwód Larionowa)
m=6; Zalety: a) mniej dławików wygładzających; b) mniejsza klasa tyrystorów; Stosowany w napędach średniej i dużej mocy.

2. Metody sterowania transformatorami odwracalnymi:
a) oddzielne, gdy grupy tyrystorów są sterowane naprzemiennie.
Zalety: 1) brak prądu wyrównawczego i dlatego konieczność włączania dławików wyrównawczych (UR);
Wady: 1) szeroka strefa prądów przerywanych; 2) nieliniowość charakterystyk mechanicznych na początku; 3) powolne odwracanie napięcia przetwornicy.
Jednocześnie częściej stosuje się oddzielne sterowanie TP.
b) koordynowany, gdy obie grupy tyrystorów są sterowane wspólnie, zgodnie z warunkiem ![]() , I
, I ![]() ,
, ![]() ;
;
Zalety: 1) charakterystyka liniowa; 2) wąska strefa prądów przerywanych; 3) szybkie cofanie.
Wady: 1) obecność statycznych i dynamicznych prądów wyrównawczych. Aby z nimi walczyć, aktywowane są reaktory wyrównawcze (UR).
3. Matematyczny opis TP

1) Układ sterowania przetwornicą tyrystorową (TCC) lub układ sterowania impulsowo-fazowego (PFC)
a) ze stabilizowanym napięciem odniesienia piłokształtnym  . Nie zawiera wyższych harmonicznych w napięciu odniesienia, zapewnia wyraźne otwarcie tyrystorów i znajduje zastosowanie w transformatorach średniej i dużej mocy.
. Nie zawiera wyższych harmonicznych w napięciu odniesienia, zapewnia wyraźne otwarcie tyrystorów i znajduje zastosowanie w transformatorach średniej i dużej mocy.
b) z niestabilizowanym sinusoidalnym napięciem odniesienia  . Znajduje zastosowanie w stacjach transformatorowych małej mocy z szerokim zakresem regulacji prędkości obrotowej transformatora.
. Znajduje zastosowanie w stacjach transformatorowych małej mocy z szerokim zakresem regulacji prędkości obrotowej transformatora.
c) jeśli SUTP jest cyfrowy, to kąt otwarcia tyrystorów, gdzie jest kodem liczbowym.
2) Część zasilająca podstacji transformatorowej.
Opisane wyrażeniem ![]() , Gdzie
, Gdzie ![]() - maksymalne wyprostowane pole elektromagnetyczne TP. Poza tym TP ma opóźnienie, które statystycznie jest średnie. Przy m=6
- maksymalne wyprostowane pole elektromagnetyczne TP. Poza tym TP ma opóźnienie, które statystycznie jest średnie. Przy m=6 ![]() .
.
a) SUTP ze stabilizowanym napięciem odniesienia piłokształtnym.
Zależność nieliniowa ![]() .
.

b) SUTP z niestabilizowanym sinusoidalnym napięciem odniesienia.
 ;
;  - zależność liniowa
- zależność liniowa ![]() !
!

Z rysunków widać, że wahania napięcia prądu przemiennego (linia przerywana) wpływają na wyjściową siłę elektromagnetyczną w przypadku a) i nie wpływają na przypadek b).
3) Obciążenie TP (silnik). Tworzy charakter prądu konwertera, który może być ciągły, graniczny ciągły i przerywany.

Charakter prądu wpływa na charakterystykę napędu. W strefie prądu ciągłego charakterystyka jest sztywna, ponieważ rezystancja wewnętrzna przetwornika jest niewielka. Przy prądzie przerywanym rezystancja wewnętrzna TC znacznie wzrasta, co zmniejsza sztywność charakterystyki. , gdzie jest rezystancją przełączania. powstaje w trybie prądu ciągłego, gdy fazy zachodzą na siebie. - rezystancja dynamiczna tyrystorów.
Strefa prądu przerywanego jest wyjątkowo niekorzystna dla regulacji, ponieważ sztywność charakterystyki napędu maleje i pojawia się nieliniowa zależność (patrz rysunek).

Typowe czujniki
Rozważmy czujniki krajowego uniwersalnego systemu regulatorów blokowych o konstrukcji analogowej (UBSR-AI).
1) Czujnik prądu DT1-AI Zastosowanie wzmacniacza operacyjnego (OA) pozwala na oddzielenie obwodów mocy i sterowania napędu, co jest konieczne również ze względów bezpieczeństwa. Osiągać ![]() dobiera się tak, aby maksymalny zmierzony prąd odpowiadał .
dobiera się tak, aby maksymalny zmierzony prąd odpowiadał .

2) Czujnik napięcia DN1-AI. Wzmocnienie dobiera się tak, aby odpowiadało maksymalnemu zmierzonemu napięciu.

3) Czujnik pola elektromagnetycznego

3) Czujniki prędkości. Jako czujniki prędkości stosowane są precyzyjne tachogeneratory prądu stałego i przemiennego.
4) Czujniki położenia
a) Rozwiązanie. Działa na zasadzie transformatora obrotowego sinusoidalnego (SCRT). W transformatorze obrotowym wirnik składa się z cewki (uzwojenia), która wraz z uzwojeniem stojana tworzy transformator. W zasadzie rezolwer zbudowany jest dokładnie w ten sam sposób, z tą tylko różnicą, że stojan zbudowany jest nie z jednego, a z dwóch uzwojeń, umieszczonych względem siebie pod kątem 90°. Rezolwer służy do określenia bezwzględnego położenia wału silnika w ciągu jednego obrotu. Dodatkowo wartość prędkości jest określana na podstawie sygnału resolwera i symulowany jest enkoder inkrementalny do sterowania położeniem. Wirnik rezolwera jest przymocowany do wału silnika. Aby móc bez szczotek przekazać do wirnika zmienne napięcie nośne, na stojanie i wirniku umieszcza się dodatkowe uzwojenia. Z dwóch wyjściowych napięć sinusoidalnych i , przesuniętych o 90° (rys. 7), można wyznaczyć kąt obrotu wirnika, prędkość obrotową oraz przyrostowy sygnał położenia (symulacja enkodera inkrementalnego).

b) Czujniki fotoelektryczne serii PDF. Brak dryfu temperatury i czasu. 500-5000 imp/obr.

5) Niedopasowanie czujników. Stosowany w systemach śledzenia.
a) Czujniki niedopasowania potencjometrycznego

b) Selsyny w trybie transformatorowym. Selsyn ma 2-fazowe uzwojenie stojana i 3-fazowe uzwojenie wirnika. Oś czujnika selsynowego napędzana jest przez urządzenie nadrzędne, a oś odbiornika selsynowego napędzana jest przez element wykonawczy. Kiedy występuje różnica kątów (tj. błąd śledzenia), na uzwojeniu stojana generowane jest napięcie. Selsyny pracują z kątami błędu do 90 stopni, po czym sygnał „przewraca się” (patrz rysunek). Istnieją również inductosyns - liniowe analogi selsynów.


Typowe regulatory
1) Statykę opisuje się równaniami algebraicznymi (EA), a dynamikę - równaniami różniczkowymi. Ułatwienie badania dynamiki złożonych układów elektromechanicznych z wykorzystaniem transformaty Laplace'a  przejść z domeny czasu t do domeny p obrazów, gdzie p (s) jest operatorem różniczkowania (Laplace'a), . W takim przypadku pilot zastępuje się automatem sterującym.
przejść z domeny czasu t do domeny p obrazów, gdzie p (s) jest operatorem różniczkowania (Laplace'a), . W takim przypadku pilot zastępuje się automatem sterującym.
Funkcja przenoszenia (TF) W(p) to stosunek obrazów Laplace'a zmiennej wyjściowej do zmiennej wejściowej (patrz kurs TAU).
2) Wskaźniki jakości procesu transformacji. Rozważmy proces przejściowy w systemie zamkniętym:

a) Błąd statyczny ![]() ;
;
b) Czas przejścia – czas ostatniego wejścia zmiennej kontrolowanej do strefy 5%;
c) Przekroczenie  ;
;
3) Standardowe regulatory. Stosowany w układach zamkniętych w celu uzyskania wymaganych wskaźników jakości. Najczęściej stosowane są regulatory proporcjonalne (P), proporcjonalno-całkujące (PI) i proporcjonalnie-całkująco-różniczkujące (PID). O wyborze typu regulatora decyduje funkcja przenoszenia obiektu regulacji. Funkcje przenoszenia regulatorów
;  ;
; 
| Implementacja obwodu analogowego | Osiągać |
 |  |
 ; ;
|  |
 ; ; ; ;
|  |
Jednoprzewodowy PDS
MINISTERSTWO EDUKACJI I NAUKI
FEDERACJA ROSYJSKA
FEDERALNA AGENCJA EDUKACJI
PAŃSTWOWA INSTYTUCJA EDUKACYJNA
WYŻSZE WYKSZTAŁCENIE ZAWODOWE
OLEJ STANOWY UFA
UNIWERSYTET TECHNICZNY
V.I.BABAKIN
Przebieg wykładów z dyscypliny:
„Zautomatyzowany napęd elektryczny w standardzie
mechanizmy produkcyjne i technologiczne
kompleksy.”
Część 2.
Ufa 2007
1.AEP z silnikiem asynchronicznym 4
1.1AEP z ciśnieniem krwi z regulacją reostatyczną 4
1.2AEP z AKZD z regulowanym napięciem doprowadzanym do stojana AD 5
2. Aktualny stan AED z silnikami prądu przemiennego 7
2.1 Problemy syntezy i kontroli AED 7
3. Zautomatyzowany asynchroniczny napęd elektryczny wykorzystujący napęd synchroniczny
Przetwornice częstotliwości maszyn elektrycznych 9
4. Zautomatyzowany asynchroniczny napęd elektryczny wykorzystujący asynchroniczny
Przetwornice częstotliwości maszyn elektrycznych 11
5. Zautomatyzowany napęd elektryczny z silnikiem prądu przemiennego ze statycznymi przetwornicami częstotliwości (SFC) 11
5.1 Przetwornica częstotliwości z łączem DC 12
6. Falowniki autonomiczne (AI)…………………………………………………………… 13
7. AEPT ze stanem awaryjnym posiadający w swojej strukturze sterowany prostownik……………………….14
8.Regulacja prędkości w AED z falownikiem z HC…………………………………………………………… ...17
9. Rozruch w AEP z falownikiem z falą uderzeniową……………………………………………………………………………………… … 18
10. Hamowanie w AED z szokiem…………………………………………………………………..19
10.1.Hamowanie poprzez licznik (TC)……………………………………………………………………..19
10.2.Hamowanie dynamiczne……………………………………………………………… 19
10.3.Rewers……………………………………………………………………………. ..20
11.Wady i zalety AED z IF z HC…………………………………………… .20
12. Zautomatyzowany napęd elektryczny za pomocą falownika o WID…………… ….20
13.Regulacja prędkości, rozruch i hamowanie w AED z WID…………………………… ...21
13.1 Kontrola prędkości w AED z WID…………………………………………………………… …21
13.2 Uruchomienie w AEP z WID…………………………………………………………… ….22
13.3 Hamowanie w AED z WID………………………………………………………………………………… 22
14 Zautomatyzowany napęd elektryczny wykorzystujący falownik PWM…………………...22
15 Zasada działania falownika PWM……………………………………………………………..23
16 Schematy ideowe falownika z PWM………………………………………………………24
17 falownik z PWM oparty na niezamykanych tyrystorach……………………………………………......25
18 Baza elementowa nowoczesnych przetwornic częstotliwości……………………………...26
18.1 Filtry sieciowe…………………………………………………………………………………27
18.2 Charakterystyka nowoczesnych wyłączników mocy o dużej mocy z dwustronnym radiatorem
19 Schematy falownika opartego na tranzystorach IGBT…………………………………...29
20 Sterowanie prędkością w AED za pomocą falownika PWM…………………………………………………………….29
21 Uruchomienie w AED z falownikiem z PWM…………………………………………………………………………………..29
22 Hamowanie w AED z falownikiem z PWM………………………………………………………..29
23 Tryby awaryjne w AED z falownikiem z PWM……………………………………………………………29
24 Wpływ długości przewodu instalacyjnego na przepięcia na zaciskach silnika……….30
25 Zasady i podstawy sterowania wektorowego……………………………………………...34
26 Implementacja sterowania wektorowego…………………………………………………..36
27 Zautomatyzowany napęd elektryczny prądu przemiennego z bezpośrednią konwersją
Częstotliwość wanu (NCF)…………………………………………………………………… ..38
28 Zautomatyzowany napęd elektryczny prądu przemiennego w obwodach kaskadowych……….40
29 Zautomatyzowane napędy elektryczne z kaskadami maszyn elektrycznych……………………………………………………………………………………………………… 42
30 Zautomatyzowane napędy elektryczne z elektromechanicznymi kaskadami maszyn elektrycznych………………………………………………………………………………………………………. .43
31 Zautomatyzowane napędy elektryczne z asynchronicznymi kaskadami zaworów (AVC).44
32 Zautomatyzowane napędy elektryczne prądu przemiennego z maszynami o podwójnym zasilaniu
Nija…………………………………………………………………………………. 0,45
33 Zautomatyzowane napędy elektryczne prądu przemiennego z maszynami podwójnej mocy w trybie synchronicznym………………………………………………………………………………… 46
34 Zautomatyzowane napędy elektryczne prądu przemiennego z maszynami o podwójnym zasilaniu
Niya w trybie asynchronicznym……………………………………………………………..48
35 Zautomatyzowane napędy elektryczne prądu przemiennego z silnikami zaworowymi ...50
36 Zautomatyzowane napędy elektryczne prądu przemiennego typu serwo……… .52
1. AED z silnikiem asynchronicznym
1.1 AED z ciśnieniem krwi z regulacją reostatyczną.
Obwody te są używane w IM z uzwojonym wirnikiem.
Zasada działania: Zmieniając rezystancję czynną obwodu wirnika, wpływamy w ten sposób na poślizg i zmienia się prędkość kątowa. 
Jednym z najważniejszych wskaźników jakości regulacji jest płynność. W tym przypadku zależy to od liczby stopni dodatkowej rezystancji wprowadzonej do obwodu wirnika, co z kolei jest ograniczone przez standardowe urządzenia sterujące wykorzystujące obwody stycznika przekaźnikowego. Wzrost liczby etapów pociągnie za sobą wzrost liczby przekaźników i styków, co z kolei doprowadzi do zmniejszenia szybkości i niezawodności systemu jako całości. Ponadto takie napędy elektryczne mają niskie wskaźniki energii, niską wydajność w zakresie głębokiej regulacji, a przy znacznym wzroście dodatkowego oporu sztywność charakterystyki gwałtownie maleje, co wpłynie na stabilność napędu elektrycznego.
W celu zwiększenia płynności regulacji stosuje się sterowanie parametryczne impulsowo. Istotą tej metody jest naprzemienne wprowadzanie i usuwanie dodatkowego oporu w obwodzie wirnika, którego średnia wartość wynosi:


gdzie t 1 jest czasem trwania stanu zamkniętego klucza;
T 2 - czas trwania stanu otwartego klucza.
 Ryc.2
Ryc.2
ω będzie zmieniać się płynnie w zakresie pomiędzy dwiema charakterystykami brzegowymi ε=1 i ε=0
Zakres regulacji prędkości w napędach elektrycznych ze sterowaniem reostatem ograniczony jest do:
Duże straty mocy (niska wydajność)
Niska stabilność (D=1,5 1).
Zasada działania takich napędów elektrycznych jest taka, że wraz ze spadkiem napięcia doprowadzanego do stojana zmniejsza się moment elektromagnetyczny proporcjonalnie do kwadratu napięcia i maleje prędkość obrotowa ω.
Regulacja odbywa się za pomocą regulatorów napięcia podłączonych do obwodu stojana. W takim przypadku istnieją dwie metody regulacji:
pulsacyjny;
ciągły.
Do niedawna stosowano głównie metody sterowania impulsowego.
Najprostszy schemat obwodu sterowania impulsowego: 
 Ryc.3
Ryc.3
W tym przypadku częstotliwość zamykania i otwierania jest proporcjonalna do częstotliwości sieci F
≤ 200 Hz. Gdy zmienia się współczynnik wypełnienia impulsów sterujących, zmienia się wartość napięcia skutecznego:  Gdy ε=1, silnik pracuje z naturalną charakterystyką mechaniczną, a klawisze K są stale zamknięte. Gdy ε maleje, prędkość kątowa maleje. W tym przypadku moment krytyczny M CR maleje, w wyniku czego zmniejsza się przeciążalność (sztywność) części roboczej charakterystyki mechanicznej. Przy małych wartościach współczynnika wypełnienia, tj. Przy niskich prędkościach napęd jest niestabilny.
Gdy ε=1, silnik pracuje z naturalną charakterystyką mechaniczną, a klawisze K są stale zamknięte. Gdy ε maleje, prędkość kątowa maleje. W tym przypadku moment krytyczny M CR maleje, w wyniku czego zmniejsza się przeciążalność (sztywność) części roboczej charakterystyki mechanicznej. Przy małych wartościach współczynnika wypełnienia, tj. Przy niskich prędkościach napęd jest niestabilny.
Wady:
Niska wydajność energetyczna, która jest związana ze wzrostem napięcia i prędkości, a także z przejściowymi procesami elektromagnetycznymi spowodowanymi włączaniem i wyłączaniem uzwojeń stojana silnika.
Takie napędy elektryczne mogą pracować tylko w trybie ciągłym, ponieważ nie zapewniają krótkotrwałego uruchamiania i zatrzymywania silnika.
KN jest włączany w okresach wyłączenia kluczy KV, przy czym ε=0 impulsów steruje kluczami KV. Napęd elektryczny będzie pracował w trybie hamowania przeciwstawnego. Rodzina właściwości mechanicznych takich napędów elektrycznych będzie sztywniejsza w części roboczej (mniejsza zdolność przeciążania).


Różnica w charakterystyce mechanicznej pomiędzy regulacją napięcia impulsowego a zmianą fazy impulsu (w części roboczej napęd elektryczny pracuje stabilniej). Przy bardzo małych wartościach ε charakterystyka przesuwa się w obszar hamowania wstecznego, co pozwala na szybkie zatrzymanie silnika. Takie napędy elektryczne są przeznaczone do pracy przerywanej i krótkotrwałej, ale te napędy elektryczne mają jeszcze niższe wskaźniki energii, ponieważ superpozycja trybu silnika i hamowania powoduje prawie ciągłe elektromagnetyczne procesy przejściowe, którym towarzyszą duże straty mocy.
Wady:
Spadek napięcia zasilania przy stałej mocy na wale silnika spowoduje spadek napięcia na zaciskach wirnika, wzrost prądu wirnika, zmniejszenie współczynnika mocy silnika i spadek sprawności.
Wskaźniki jakości:
Niski poziom energii;
Niska stabilność regulacji:
Zakres regulacji D=1,5 1;
Gładkość jest wysoka;
Kierunek to pojedyncze łącze „w dół”;
Obecnie szeroko stosowane są generatory elektryczne z ciągłą regulacją napięcia:
RN-BP;
TRN-AD.
Ostatnio takie napędy elektryczne otrzymały nieuzasadnioną szeroką reklamę. Proponuje się ich wykorzystanie do mechanizmów działających w powtarzalnym trybie krótkotrwałym. Regulacja ω w układzie TRN-AD odbywa się poprzez zmianę napięcia na zacisku stojana poprzez zmianę kąta zapłonu tyrystorów. Ryc.5


^
Zalety EP z wykorzystaniem systemu TRN-AD:
Pod względem kosztów początkowych jest o 30-40% tańszy niż napęd elektryczny z przetwornicą częstotliwości; Koszty konserwacji są obniżone o 20-50%.
^ Wady EP według systemu TRN-AD: Dolny zakres regulacji D=2÷1.
Wadę tę w pewnym stopniu można wyeliminować stosując AED z regulowanym polem elektromagnetycznym w uzwojeniu stojana, tj. regulując nie napięcie, ale pole elektromagnetyczne.
^ 2. Aktualny stan AED z silnikami prądu przemiennego.
2.1 Problemy syntezy i kontroli AED.
Obiekt kontrolny –
ED (przetwornica elektromechaniczna);
SP (przetwornica mocy elektrycznej);
IP (przetwornik pomiarowy).
1) wyd(przetwornica elektromechaniczna).
Najszersza klasa silników elektrycznych stosowana w nowoczesnych napędach elektrycznych AKZD ogólnego zastosowania przemysłowego. Silniki te przeznaczone są do stosowania w regulowanych napędach elektrycznych, do bezpośredniego podłączenia do sieci przemysłowej. Zasadniczo zmiany w tym obszarze mają charakter pewnych ulepszeń konstrukcyjnych silnika elektrycznego. Opracowywane i produkowane są masowo specjalne modyfikacje ACPD do stosowania w napędach elektrycznych o zmiennej częstotliwości (Siemens od pięciu lat opracowuje i produkuje masowo ACPD do użytku przy niskich i wysokich częstotliwościach zasilania 500-1000 Hz). Ponadto wzrasta produkcja diod LED wzbudzanych magnesami trwałymi (bezkontaktowymi). Te ED mają ulepszone wskaźniki masy, rozmiaru i ceny i nie są gorsze pod względem wskaźników technicznych i energetycznych. Wśród obiecujących silników elektrycznych znajduje się silnik indukcyjny, który zdaniem twórców ma znacznie lepsze parametry techniczne i energetyczne oraz wymaga bardzo prostego przetwornika mocy (koszt napędu elektrycznego jest znacznie niższy). Synchroniczny silnik elektryczny reluktancyjny charakteryzuje się wskaźnikami masy i wymiarów mieszczącymi się w przedziale AD i SD, a jednocześnie znacznie wyższą efektywnością energetyczną przy znacznie niższym koszcie.
2) SP(przetwornica mocy elektrycznej);
W zakresie wspólnych przedsięwzięć w napędach elektrycznych z silnikami prądu stałego stosuje się obecnie głównie przetwornice o budowie prostownikowej – AIN. Co więcej, jeśli do 2000 roku nie uregulowano wymagań dotyczących jakości rektyfikacji, obecnie pojawiło się szereg dokumentów regulacyjnych, które ściśle regulują obecność urządzeń prostowniczych w strukturze wspólnych przedsięwzięć. Są to standardy IEEE-519, IEC555 - standardy integracji; GOST 13109. Aby poprawić wskaźniki jakości nowoczesnych wspólnych przedsięwzięć, w szczególności w celu poprawy jakości zużycia energii, a mianowicie zwiększenia współczynnika mocy, obecnie stosuje się prostowniki na w pełni kontrolowanych przełącznikach mocy ze stabilizacją napięcia wyjściowego. Obwody z dodatkową indukcyjnością oraz obwody z przełącznikiem wejścia przełączającego są realizowane przy użyciu inteligentnej technologii. Bardziej wydajne i tańsze wydają się jednak wspólne przedsięwzięcia z niesterowanymi prostownikami. Obecnie spółka JV korzysta z nowoczesnej bazy, w której zastosowano nowoczesne urządzenia elektroniczne takie jak tyrystory MGT czy IGST oraz w pełni sterowane tranzystory IGBT. Ponadto obecnie opracowywane są tranzystory o rozdzielczości napięciowej 6-10 kV.
Obecnie najbardziej obiecującym trybem działania wspólnego przedsięwzięcia jest tryb PWM wysokiej częstotliwości z częstotliwością modulacji 20 kHz i sterowaniem wektorowym (działanie poprzez składowe tworzące moment obrotowy i tworzące strumień prądu stojana). Ten tryb jest najkorzystniejszy dla silników o częstotliwości znamionowej 500-1000 Hz, ponieważ w tym przypadku problem dopasowania częstotliwości modulacji do częstotliwości napięcia zasilającego silnik jest znacznie łatwiejszy do rozwiązania. Obecnie obiecującym typem wspólnego przedsięwzięcia jest także NPC, która ma strukturę macierzową z macierzowym systemem kontroli. Zaletą takich konwerterów jest brak elementów reaktywnych, tj. pojemności i indukcyjności w obwodzie mocy, niemal sinusoidalny kształt napięcia i prądu wyjściowego, a także możliwość pracy w wiodącym trybie cosφ.
3) IP(przetwornik pomiarowy).
Tradycyjnie znane środki są obecnie stosowane jako mierniki pierwotne, do których zaliczają się produkowane na rynku czujniki prądu i napięcia, czujniki Halla, tachogeneratory, fotoimpulsy i czujniki przemieszczenia kodu oraz czujniki położenia, rewolwery elektromagnetyczne, synchronizatory itp. Stopień wykorzystania takich nowoczesnych czujników, jak pojemnościowe i laserowe, jest praktycznie zerowy. Najbardziej obiecującym rodzajem MT są liczniki pośrednie, w których na podstawie łatwo mierzalnych parametrów, takich jak reaktancja czynna i indukcyjna silnika, prędkość i położenie wirnika itp. Przy zastosowaniu takich układów pomiarowych nie ma konieczności stosowania dużej liczby czujników, a w szczególności czujnika prędkości obrotowej. Takie systemy pomiarowe nazywane są bezczujnikowymi.
^
Zadania sterowania napędem elektrycznym:
Najczęstszym problemem sterowania jest problem bezpośredniej regulacji prędkości obrotowej silnika elektrycznego. Ponadto istnieją specjalnie regulowane napędy, które realizują zadania regulacji elektromagnetycznego momentu obrotowego, mocy, przyspieszenia, regulacji położenia wirnika i regulacji dowolnego parametru technologicznego. Ponadto dochodzą zadania stabilizacji, śledzenia, pozycjonowania, zapewnienia niezmienności (polega na zapewnieniu niezależności lub słabej zależności od niekontrolowanych zakłóceń), zapewnienia autonomii (zapewnienia niezależności dowolnego parametru obiektu od innych parametrów).
Synteza sterowania ED sprowadza się do znalezienia dostatecznie uwarunkowanego modelu ED, który obecnie reprezentuje w większości przypadków układ równań Kirchhoffa zgodnie z drugą zasadą obwodów elektromagnetycznych ED i SP. Zazwyczaj równania te są zapisywane dla równoważnej maszyny dwufazowej, a także układu równań Newtona dla mechanicznych obwodów elektrycznych.
Główny problem podczas tworzenia modelu ES:
Biorąc pod uwagę nasycenie obwodu magnetycznego silnika;
Uwzględnianie elastycznych połączeń mechanicznych;
Uwzględnianie połączeń nieliniowych.
AED z falownikami maszyn elektrycznych mają ważną zaletę: kompatybilność z systemem elektroenergetycznym, tj. nie zanieczyszczaj sieci.
Istnieją dwa typy falowników do maszyn elektrycznych:
Synchroniczny przemiennik częstotliwości z maszyną elektryczną (EMSFC);
Falownik asynchroniczny maszyny elektrycznej (EMAC).
AEP z elektryczną regulacją częstotliwości maszyny.
Głównym elementem takiego układu jest trójfazowy generator synchroniczny dopasowywany mocą do silnika napędowego. W tym przypadku napięcie wyjściowe i częstotliwość są określone przez prędkość kątową wału generatora i wielkość strumienia magnetycznego wzbudzenia. Gdy zmieni się prędkość, zmieni się napięcie wyjściowe. Jeśli weźmiemy napięcie na zaciskach fazy uzwojenia stojana, oczywiste jest, że kiedy Ф=konst wraz ze wzrostem prędkości obrotowej wału, jednocześnie ze wzrostem częstotliwości, wzrośnie również wartość skuteczna napięcia wyjściowego. W takim przypadku można zastosować jedynie prawo kontroli proporcjonalnej.

 Ryc.6
Ryc.6
Komputer zawiera:
Głównym ogniwem jest trójfazowy generator synchroniczny (G2);
DPT NV (D2) wyjście układu G-D jest połączone wałem z SG;
Silnik napędu pomocniczego AKZ (D1) z nieregulowaną prędkością.
Wskaźniki jakości:
Niska wydajność, wysoki cosφ;
P usta min = 400%
Zalety AED z ESP:
Łatwość zarządzania.
Wady AED z ESPC:
Słaba efektywność;
Możliwość regulacji wyłącznie według prawa proporcjonalnego.
^
4. Zautomatyzowany asynchroniczny napęd elektryczny z wykorzystaniem asynchronicznych przemienników częstotliwości maszyn elektrycznych.
Głównym elementem takiego układu jest trójfazowy generator asynchroniczny dobrany mocą do silnika napędowego.
 Ryc.7
Ryc.7
Wskaźniki jakości:
Regulacja jest dwustrefowa, płynna, stabilna;
Niska wydajność, wysoki cosφ;
P usta min = 200-400%
Zalety AED z ESP:
Brak negatywnego wpływu na sieć;
Łatwość zarządzania.
Wady AED z ESPC:
Słaba efektywność;
Obecność dużej liczby części obrotowych;
Niezadowalające wskaźniki masy i rozmiaru;
Możliwość regulacji dowolnym prawem.
Konieczność stosowania autotransformatorów.
Obecnie przetwornica częstotliwości jest najpowszechniej stosowanym i najbardziej obiecującym rodzajem przetwornicy częstotliwości jako część zautomatyzowanego napędu elektrycznego z silnikiem prądu przemiennego.
HRO jest klasyfikowane według następujących kryteriów:
Zgodnie ze strukturą konwersji energii.
HRC z bezpośrednią konwersją.
VHF z łączem DC.
Według rodzaju falowników dzieli się je na:
Falowniki z falownikami zasilanymi z sieci.
Falownik z falownikiem autonomicznym
JEŚLI z AIN
JEŚLI z AIT
Falownik z AI z komutacją przemienną (falownik z niepełnym napięciem sterującym)
Falownik AI z indywidualnym przełączaniem (falownik z pełnym napięciem sterującym)
^
5.1 Przetwornica częstotliwości z łączem DC
Obecnie tego typu przetwornice częstotliwości są najbardziej rozpowszechnionym typem i w odróżnieniu od NP+Ch dostarczane są jako samodzielny element napędu elektrycznego.
 Ryc.8
Ryc.8
Gdzie U 1 jest trójfazowym napięciem przemiennym o stałej amplitudzie.
P 1 – prostownik sterowany lub niesterowany, którego zadaniem jest zamiana wejściowego napięcia sinusoidalnego na wyjściowe napięcie stałe (pulsujące).
F – filtr prądu lub napięcia ma za zadanie wygładzić tętnienia na wyjściu prostownika.
P 2 – autonomiczny falownik prądu lub napięcia, przeznaczony do przetwarzania wygładzonego prądu stałego lub napięcia na trójfazowy prąd przemienny.
M – silnik trójfazowy prądu przemiennego z wirnikiem klatkowym.
W proponowanym schemacie blokowym blok P 1 może pracować zarówno w trybie kontrolowanym, jak i niekontrolowanym. W tym przypadku w pierwszym przypadku AI pełni funkcje zmiany jedynie częstotliwości wyjściowej przetwornicy, a funkcje wpływania na amplitudę napięcia wyjściowego wykonuje prostownik. W drugim przypadku AI wykonuje funkcje zmiany częstotliwości wyjściowej i wartości skutecznej napięcia wyjściowego.
Opcja HC ma niewątpliwą zaletę, a mianowicie znaczne uproszczenie układu sterowania, pomimo obecności jednostki sterującej. Jednocześnie cały system jest znacznie tańszy.
W przypadku opcji NV znacznie poprawia się kompatybilność całego systemu z siecią elektryczną. Jednak w tym przypadku schemat sterowania staje się znacznie bardziej skomplikowany, a zatem cały system staje się znacznie droższy.
^
6. Falowniki autonomiczne (AI).
Ze względu na stopień sterowności AI dzielą się na:
AI z przełączaniem naprzemiennym.
AI z indywidualnym przełączaniem.
Rozważmy zasadę działania AI z przełączaniem naprzemiennym na przykładzie jednofazowej AI, w której przełączniki mocy są blokowane za pomocą kondensatora przełączającego.
T  1,T2 – tyrystory robocze
1,T2 – tyrystory robocze
Niech w chwili t = 0 T2 będzie otwarte, T1 będzie zamknięte; napięcie wejściowe jest przykładane do Rн2, po upływie czasu równego okresowi przełączania T2, do T1 przykładany jest impuls odblokowujący. W tym przypadku napięcie wejściowe jest przykładane do Rn1, a poprzez obwód otwarty T1, Rn1, Rn2 napięcie wsteczne ze Sk jest przykładane do T2, w wyniku czego T2 jest zablokowany itp. Okres przełączania to czas otwarcia klucza.
Ze względu na kształt napięcia i prądu wyjściowego Ai dzieli się na: Dla AIT kształt napięcia wyjściowego zależy zarówno od kolejności i czasu trwania przełączania wyłączników mocy, jak i od charakteru obciążenia oraz kształtu prąd wyjściowy zależy tylko od kolejności i czasu trwania przełączania wyłączników mocy.
W przypadku AIN kształt prądu wyjściowego zależy zarówno od kolejności i czasu trwania przełączania wyłączników mocy, jak i od charakteru obciążenia, natomiast kształt napięcia wyjściowego zależy tylko od kolejności i czasu trwania przełączania wyłączników mocy .
Zewnętrzna różnica między AIT i AIN: AIT ma filtr wejściowy L i filtr wejściowy L lub LC. Ponadto, jeśli obwód falownika wykorzystuje nie w pełni sterowalne przełączniki mocy, wówczas na każdą fazę AIT przypada jeden kondensator, podczas gdy AIT ma jeden kondensator przełączający na każdy wyłącznik zasilania.
Rozważmy działanie jednofazowego AIT.

T1, T3 – wyłączniki mocy grupy anodowej
T2, T4 – wyłączniki mocy grupy katodowej
S K – kondensator przełączający
L – filtr wejściowy.
W pierwszej chwili w stanie rozwartym znajdują się dwa krzyżowe wyłączniki mocy – pierwszy z grupy anod, drugi z grupy katod. W tej chwili pozostałe dwa klawisze zasilania są odblokowane, pierwsze dwa są zablokowane itp. Ponadto, jeśli klucze T3 i T2 są otwarte, kondensator jest ładowany w kierunku do przodu, a gdy klucze T1 i T4 są otwarte, kondensator jest ładowany w kierunku przeciwnym.
 Ryc.11
Ryc.11
W chwili t = 0 impuls odblokowujący jest wysyłany do T1 i T4. kondensator Sk w tym momencie jest wstępnie naładowany, a gdy T1 i T4 są odblokowane, rozładowuje się do T3 i T2 w kierunku ujemnej polaryzacji, zamykając w ten sposób T3 i T2. w następnym okresie czasu równym okresowi przełączania T1 i T4 prąd przez rezystancję obciążenia będzie płynął w kierunku dodatnim. Po pewnym czasie kondensator jest ładowany w przeciwnym kierunku. W tym momencie impuls odblokowujący jest przykładany do T3 i T2, kondensator jest rozładowywany w kierunku ujemnej polaryzacji, blokuje T1 i T4, prąd przepływa przez T4, Zn i otwarty T2 i będzie miał kierunek ujemny.
^
7. AEPT ze stanem awaryjnym posiadającym w swojej strukturze sterowany prostownik.
Obecnie istnieje tendencja do rozszerzania zakresu stosowania prostowników sterowanych w konstrukcji falownika, szczególnie w tych napędach elektrycznych, które ze względu na warunki technologiczne wymagają częstego hamowania (tj. dla napędu elektrycznego pracującego w trybie przerywanym S5). Wynika to z faktu, że włókno węglowe ma tak ważną właściwość, jak przewodność dwukierunkowa. Pozwala to na zastosowanie tak energooszczędnego rodzaju hamowania, jak regeneracyjne. Ale negatywnych właściwości węglowodorów nie można całkowicie wyeliminować. Obecnie stosuje się przetwornice zawierające dwa bloki wejściowe: pierwszy to prostownik niesterowany, który uczestniczy w pracy napędu w trybie silnikowym; drugi to fala uderzeniowa, która uczestniczy w pracy falownika w trybie hamowania.
Rozważmy obwód i zasadę działania falownika z tyrystorem HF i tyrystorem AIT, w którym przełączanie wyłączników mocy odbywa się za pomocą kondensatorów przełączających.
- Ryc.12
Ryc.12
Blok wejściowy przekształtnika stanowi fala uderzeniowa zbudowana w oparciu o trójfazowy obwód prostowniczy mostka sześciocyklowego. Główną funkcją CF, oprócz prostowania, jest regulacja wartości skutecznej napięcia wyjściowego przetwornicy. Aby wygładzić tętnienie prądu wyjściowego prostownika, stosuje się filtr szeregowy L.
AIT składa się z sześciu wyłączników mocy, z których trzy T1, T3, T5 mają wspólną anodę i tworzą grupę anod; pozostałe trzy T2, T4, T6 mają wspólną katodę i tworzą grupę katodową. Zasada działania AIT polega na tym, że w pierwszej chwili w stanie otwartym znajdują się dwa krzyżujące się wyłączniki mocy: jeden z grupy anodowej, drugi z grupy katodowej. Odblokowanie kluczy zasilania następuje w momencie podania impulsów sterujących z BUI (wielokanałowy system sterowania). W tym przypadku sekwencja impulsów dostarczanych do każdego zaworu odpowiada ich numerowi seryjnemu. Przełączniki zasilania są blokowane, gdy którykolwiek z trzech kondensatorów zostanie rozładowany w kierunku ujemnej polaryzacji, co również odpowiada kolejności naprzemiennych numerów przełączników zasilania.
Przy częstotliwości wyjściowej F 2
= 50 Hz konwerter pracuje w trybie: odstęp pomiędzy dwoma sąsiednimi impulsami sterującymi wynosi  , czas otwarcia każdego klucza wyniesie 120 0. W takim przypadku kondensatory blokujące C1, C2, C3 muszą mieć taką pojemność, aby czas równy 60 0 utrzymywał ładunek niezbędny do zablokowania kolejnego klucza.
, czas otwarcia każdego klucza wyniesie 120 0. W takim przypadku kondensatory blokujące C1, C2, C3 muszą mieć taką pojemność, aby czas równy 60 0 utrzymywał ładunek niezbędny do zablokowania kolejnego klucza.
Działanie konwertera demonstrujemy za pomocą schematu:
Prąd z wyjścia prostownika ma idealny, wyprostowany kształt.
Kierunek prądów w fazach kabla instalacyjnego przekształtnika-silnika
od P do D - dodatnie.
od D do P - ujemny.
 Ryc.13
Ryc.13 1. t = 0 Otwarte T1, T6. Prąd w obwodzie przepływa przez wyłącznik zasilania T1, fazę A kabla i przez otwarty T6 powraca do fazy C. W tym przypadku C3 jest wstępnie ładowany, w przedziale czasu 0-60 0 C1 jest ładowany, a C3 utrzymuje swój ładunek.
2. t = 60 0 Impuls odblokowujący jest wysyłany do T2. W tym przypadku C3 ładuje się na T6 i blokuje go. W przedziale czasowym 60 0 - 120 0 T1 i T2 są otwarte. Prąd przepływa przez fazę A do silnika i przez fazę B od silnika do przetwornicy. . W tym czasie C2 jest ładowany, C1 zachowuje ładunek.
3. t = 120 0 Impuls odblokowujący jest wysyłany do T3. W tym przypadku C1 rozładowuje się na T1 i blokuje go. W przedziale czasowym 120 0 - 180 0 T2 i T3 są otwarte. Prąd przepływa przez fazę B do silnika i przez fazę C od silnika do przetwornicy. . W tym czasie C3 jest ładowany, C2 utrzymuje ładunek.
4. t = 180 0 Impuls odblokowujący zostaje wysłany do T4. W tym przypadku C2 rozładowuje się na T2 i blokuje go. W przedziale czasowym 180 0 - 240 0 T3 i T4 są otwarte. Prąd przepływa przez fazę B do silnika i przez fazę A od silnika do przetwornicy. . W tym czasie C1 jest ładowany, C3 utrzymuje ładunek.
5. t = 240 0 Impuls odblokowujący zostaje wysłany do T5. W tym przypadku C3 ładuje się na T3 i blokuje go. W przedziale czasowym 240 0 - 300 T4 i T5 są otwarte. Prąd przepływa przez fazę C do silnika i przez fazę A od silnika do przetwornicy. . W tym czasie C2 jest ładowany; C1 strzeże jego ładunku.
6. t = 300 0 Impuls odblokowujący jest wysyłany do T6. W tym przypadku C1 ładuje się na T4 i blokuje go. W przedziale czasowym 300 0 - 360 T5 i T6 są otwarte. Prąd przepływa przez fazę C do silnika i przez fazę B od silnika do przetwornicy. . W tym czasie C3 jest ładowany, C2 strzeże jego ładunku.
Aby zwiększyć częstotliwość wyjściową, konieczne jest zmniejszenie odstępu między impulsami sterującymi, w tym celu zwiększamy kąt sterowania β. Odpowiednio, wraz z prawem sterowania zmieni się wartość skuteczna napięcia wyjściowego, w szczególności przy proporcjonalnym prawie sterowania, wraz ze wzrostem częstotliwości kąt sterowania prostownika α będzie się zmniejszał proporcjonalnie do wzrostu kąta β.
Istotną wadą rozważanego obwodu jest konieczność stosowania kondensatorów dużej mocy, niezbędnych do utrzymania ładunków w przerwie między dwoma przełączeniami. Zastosowanie AI z diodami odcinającymi może częściowo pozbyć się tej wady.
 Ryc.14
Ryc.14
Tutaj, w obwodach katodowych i anodowych wyłączników mocy, diody odcinające D1, D3, D5 i D2, D4, D6 są połączone szeregowo. Ich liczba jest równa liczbie kluczy. Diody te zapobiegają rozładowaniu kondensatorów w okresie przełączania rozłącznika i dzięki temu znacznie poprawiają odczyty falownika.
^
8. Kontrola prędkości w AED za pomocą falownika za pomocą fali uderzeniowej.
W AED posiadającym w swojej konstrukcji przetwornicę częstotliwości i sterowany prostownik, kontrola prędkości ω odbywa się w szerokim zakresie, zapewniając jednocześnie dość wysoką jakość wskaźników. Regulacja ω odbywa się poprzez oddziaływanie na sztuczną inteligencję za pomocą urządzenia sterującego, jednocześnie wpływając na falę uderzeniową za pomocą urządzenia sterującego zgodnie z prawem regulacyjnym. Możliwa jest w tym przypadku regulacja dwustrefowa. Jednak w przypadku mechanizmów z M C =
konst, oraz dla mechanizmów o liniowym narastaniu M Z Regulacja w górę jest ograniczona przez fakt, że wymaga jednoczesnego wzrostu częstotliwości w stosunku do F NIE M, zwiększyć napięcie. W rezultacie może nastąpić uszkodzenie izolacji. Regulacja ω w górę stosowana jest znacznie rzadziej niż w zakresie dolnym iw małych zakresach.
Ogólnie rzecz biorąc, rodzina cech kontrolnych będzie miała postać:
 Ryc.15
Ryc.15
Wskaźniki jakości regulacji:
Stabilność podczas regulacji częstotliwości jest wysoka, ponieważ cechy w części roboczej mają tę samą sztywność.
Gładkość jest praktycznie nieograniczona.
Wysoka sprawność natomiast przy głębokiej regulacji w dół od częstotliwości podstawowej, co wymaga znacznego zmniejszenia kąta sterowania α prostownika, a współczynnik mocy napędu jako całości może być bardzo niski.
Regulacja odbywa się głównie wtedy, gdy M C = konst na wale silnika.
Kierunek jest dwustrefowy, stosowana jest głównie regulacja w dół.
Zakres regulacji D=100÷1.
^
9. Uruchomienie AED z falownikiem falą uderzeniową.
Rozruch rozpoczyna się przy obniżonym napięciu i minimalnej częstotliwości, co odpowiednio zapewnia brak udarów prądu lub minimalizację prądu, a jednocześnie duże momenty rozruchowe. W tym przypadku falownik pracuje z długimi czasami przełączania wyłączników mocy, a HC z kątem sterowania α = P/2. Efektywność energetyczna rozruchu w takim układzie jest zmniejszona ze względu na to, że na początku rozruchu napęd zużywa dużą ilość składnika biernego.
 Ryc.16
Ryc.16
W podręczniku edukacyjnym, na który zwracamy uwagę, porozmawiamy o podstawach napędu elektrycznego i jego najbardziej obiecującym typie - asynchronicznym napędzie elektrycznym o zmiennej częstotliwości. Podręcznik przeznaczony jest dla pracowników zajmujących się marketingiem skomplikowanych produktów elektrycznych, takich jak zautomatyzowane napędy elektryczne, oraz dla studentów specjalności elektrotechnika.
Wykładowca: Oniszczenko Georgy Borisovich. Doktor nauk technicznych, profesor. Członek zwyczajny Akademii Nauk Elektrotechnicznych Federacji Rosyjskiej.
Cykl wykładów wideo obejmuje następujące zagadnienia:
1. Funkcje i budowa zautomatyzowanego napędu elektrycznego.
2. Ogólna charakterystyka regulowanego napędu elektrycznego.
3. Zasada działania silnika asynchronicznego.
4. Częstotliwościowe sterowanie prędkością silnika asynchronicznego.
5. Urządzenia półprzewodnikowe sterowane mocą.
6. Schemat blokowy przetwornicy częstotliwości.
7. Autonomiczny falownik napięcia. Zasada modulacji szerokości impulsu.
8. Prostownik i obwód DC jako część przetwornicy częstotliwości.
9. Schematy blokowe sterowania napędem elektrycznym o zmiennej częstotliwości.
10. Cechy przetwornic częstotliwości wysokiego napięcia.
11. Obszary zastosowań napędów elektrycznych o zmiennej częstotliwości.
Rozpatrzenie tych zagadnień pozwoli nam uzyskać dość pełne zrozumienie składu, zasady działania, konstrukcji obwodu, właściwości technicznych i obszarów zastosowania asynchronicznego napędu elektrycznego o zmiennej częstotliwości.
Wykład 1. Funkcje i budowa zautomatyzowanego napędu elektrycznego
Celem pierwszego wykładu jest przybliżenie roli i znaczenia zautomatyzowanych napędów elektrycznych we współczesnej produkcji przemysłowej oraz w systemie elektroenergetycznym kraju.
Wykład 2. Napęd elektryczny nastawny – główny typ współczesnego napędu elektrycznego
Rozważane są ogólne zagadnienia związane z tworzeniem i zastosowaniem regulowanych napędów elektrycznych.
Wykład 3. Zasada działania asynchronicznego silnika elektrycznego
Cechy konstrukcyjne i główne cechy najpopularniejszych maszyn elektrycznych - silników asynchronicznych. Silniki te są szeroko stosowane w przemyśle, rolnictwie, zakładach użyteczności publicznej i innych dziedzinach. Zakres mocy produkowanych silników asynchronicznych jest bardzo szeroki - od setek watów do kilku tysięcy kilowatów, ale zasada działania tych maszyn jest taka sama dla wszystkich rozmiarów i modyfikacji.
Wykład 4. Częstotliwościowe sterowanie prędkością silnika asynchronicznego
Najskuteczniejszym sposobem regulacji prędkości silnika asynchronicznego jest zmiana częstotliwości i amplitudy napięcia trójfazowego przyłożonego do uzwojeń silnika asynchronicznego. Ten sposób sterowania jest szeroko stosowany w ostatnich latach w napędach elektrycznych różnego przeznaczenia, zarówno niskonapięciowych o napięciach do 400 V, jak i wysokonapięciowych napędach dużej mocy o napięciach 6,0 i 10,0 kV.
W tej części omówiono zasady regulacji prędkości silnika poprzez zmianę częstotliwości podawanego napięcia, przedstawiono możliwe algorytmy zmiany nie tylko częstotliwości, ale także amplitudy napięcia, a także przeanalizowano charakterystyki napędu uzyskane metodą sterowania częstotliwością.
Wykład 5. Zasada działania i budowa przetwornicy częstotliwości
Powstanie i masowa produkcja w pełni sterowalnych urządzeń półprzewodnikowych mocy wywarło rewolucyjny wpływ na rozwój wielu rodzajów urządzeń elektrycznych, zwłaszcza napędów elektrycznych. Nowe, w pełni sterowalne urządzenia półprzewodnikowe obejmują tranzystory bipolarne z izolowaną bramką (IGBT) i połączone tyrystory wyłączające sterowanie. Na ich podstawie możliwe stało się stworzenie przemienników częstotliwości do zasilania silników prądu przemiennego i płynnej regulacji ich prędkości obrotowej. W tej części omówiono charakterystykę nowych półprzewodnikowych urządzeń mocy oraz podano ich parametry.
Wykład 6. Skalarne systemy sterowania silnikami
W przypadku napędów elektrycznych pracujących z ograniczonym zakresem regulacji prędkości oraz w przypadkach, gdy nie jest wymagana duża prędkość i dokładność sterowania, stosuje się prostsze skalarne układy sterowania, które omówione są w tym podrozdziale.
Moduł nr 7 „Sterowanie wektorowe napędami elektrycznymi o zmiennej częstotliwości”
Sterowanie wektorowe silnikiem asynchronicznym opiera się na dość skomplikowanych algorytmach, które odzwierciedlają reprezentację procesów elektromagnetycznych w silniku w postaci wektorowej. Na tym wykładzie postaramy się przedstawić podstawy sterowania wektorowego w pewnym uproszczeniu, unikając skomplikowanych obliczeń matematycznych.
Niedługo będzie kontynuacja!