ภาพรวมของแบบจำลองหัวถนนทั่วไปในอุตสาหกรรมการทำเหมืองถ่านหิน รัสเซียและบัลแกเรียหารือถึงศักยภาพในการขยายความร่วมมือกับผู้นำโรดเฮดของจีน
อ่าน 5 นาที
Roadheader - อุปกรณ์พิเศษที่ออกแบบมาเพื่อบดหินบด บรรจุเศษหินลงในรถเข็นและกลไกการขนส่งอื่นๆ อุปกรณ์นี้ใช้ในการพัฒนาการทำงานของเหมืองในระนาบแนวนอนและแนวเอียงในการปรับปรุงอุโมงค์
ในอุตสาหกรรมเหมืองแร่และถ่านหิน มีความต้องการอุปกรณ์พิเศษเพิ่มขึ้นซึ่งสามารถเพิ่มผลผลิตในขณะที่ลดเวลาที่ใช้ไป การพัฒนาของผู้ผลิตในประเทศและต่างประเทศมีจุดมุ่งหมายเพื่อปรับปรุงและขยายขอบเขตการใช้งาน เครื่องเจาะหัวทุ่นระเบิดที่ทันสมัยพร้อมแผงควบคุมช่วยเพิ่มความปลอดภัยและความสะดวกในการทำงาน
การจัดหมวดหมู่
โมเดลที่ใช้กันอย่างแพร่หลาย ได้แก่ รถเกี่ยวนวด 1GPKS, P-110, KSP-32 และ 35, KP-21 ของการผลิตในประเทศรวมถึงอุปกรณ์ขุดเจาะของ บริษัท ต่างประเทศ ช่วงของยานพาหนะพิเศษจำแนกตามปัจจัยต่อไปนี้:

- โดยวิธีการประมวลผลด้านล่าง
- ตามขอบเขต;
- ตามน้ำหนักและกำลังของอุปกรณ์
ตามวิธีการของการประมวลผลก้นหลุม คนงานเหมืองจะถูกแบ่งออกเป็นกลไกของการกระทำแบบวนซ้ำ (เลือก) กับการประมวลผลตามลำดับโดยวิธีการหรือชั้น อุปกรณ์เจาะหรือดำเนินการต่อเนื่องช่วยให้สามารถบำบัดก้นหลุมได้พร้อมกัน อุปกรณ์ประเภทที่สองประกอบด้วยเครื่องเจาะเหมืองซึ่งมีผลผลิตสูง
ตามขอบเขตการใช้งาน ผู้เชี่ยวชาญในอุตสาหกรรมเหมืองแร่ได้แบ่งเครื่องจักรออกเป็นกลไก โดยมีวัตถุประสงค์เพื่อตัดการทำงานตามแนวตะเข็บ การรวมกันอีกประเภทหนึ่งคืออุปกรณ์สำหรับเตรียมการเมื่อมีปฏิสัมพันธ์กับแร่ธาตุและหินที่อ่อนแอ เครื่องขุดถ่านหินสำหรับตะเข็บขนาดกลางได้รับการพัฒนาสำหรับหินที่มีความแข็งปานกลาง อุปกรณ์ดังกล่าวดำเนินการด้านทุนและการเตรียมการ
ขึ้นอยู่กับกำลังและน้ำหนักของอุปกรณ์พิเศษ ประเภทต่อไปนี้มีความโดดเด่น:
- หนักมวลถึง 100 ตันและกำลังเครื่องยนต์ 400 กิโลวัตต์
- ขนาดกลางที่มีมวล 35-50 ตันและกำลัง 100-160 กิโลวัตต์
- น้ำหนักเบามวลไม่เกิน 25 ตันและคุณสมบัติด้านพลังงานสอดคล้องกับ 60-80 กิโลวัตต์
ดู " รถเกี่ยวข้าว TOP-2 Lida จากโรงงาน Lidagroprommash
รถหัวลากทุกประเภทมีลักษณะเฉพาะของตัวเองซึ่งต้องนำมาพิจารณาเมื่อเลือกรุ่นอุปกรณ์พิเศษที่เหมาะสม
หลักการทำงาน
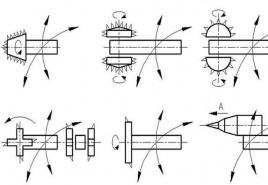
เครื่องมุ่งหน้าทุ่นระเบิดเป็นอุปกรณ์ที่มีลูกศรและเม็ดมะยมซึ่งติดตั้งเครื่องมือตัดประเภทการตัด กลไกนี้ช่วยให้คุณทำงานกับด้านล่างของการกำหนดค่าที่เป็นไปได้ทั้งหมดในส่วนตัดขวาง
อุปกรณ์ประเภทนี้ได้รับการติดตั้งเพิ่มเติมด้วยสิ่งที่แนบมาที่อนุญาตให้ดำเนินการเสริม - ยึดหลังคาและด้านข้างยกส่วนรองรับ องค์ประกอบที่แนบมาช่วยเพิ่มระดับความมั่นคงของกลไกทั้งหมดช่วยควบคุมทิศทางการเดินทาง บางรุ่นใช้การควบคุมด้วยเลเซอร์และการควบคุมซอฟต์แวร์
เครื่องขุดถ่านหินแบบแข็งมีการติดตั้งตัวเครื่องแบบโรตารี่พร้อมดอกสว่านซึ่งมีถังและชุดกรวยลูกกลิ้งอยู่ เมื่อประมวลผลด้านล่างโดยใช้อุปกรณ์หลักจะทำการทำลายหินอย่างสมบูรณ์ ในบางกรณี อาจจำเป็นต้องใช้เครื่องตัดที่ช่วยให้คุณสามารถสร้างรูปทรงโค้งมนได้
มีการติดตั้งช่วงล่างแบบตีนตะขาบบนยานพาหนะเฉพาะทางที่ทันสมัย ซึ่งทำให้อุปกรณ์มีความสามารถข้ามประเทศเพิ่มขึ้น
ภาพรวมรุ่น
กลไกขับเคลื่อนหลายตัวได้รับการออกแบบมาเพื่อดำเนินการชุดปฏิบัติการ - การทำลาย, การบรรทุก, การส่งมอบหิน, การสนับสนุนของเหมือง, การระบายอากาศ, การดับฝุ่น อุปกรณ์การทำงานดังกล่าวผลิตขึ้นในสถานประกอบการของรัสเซียและต่างประเทศ

หนึ่งในโมเดลที่ได้รับความนิยมมากที่สุดคือโร้ดเฮดเดอร์ KSP-32 ซึ่งออกแบบมาสำหรับการบรรทุกและทำลายมวลหินในการใช้งานแนวนอนหรือแนวลาดเอียง อุปกรณ์นี้ทำงานร่วมกับถ่านหิน หินผสม ตลอดจนในสภาวะของการก่อตัวของก๊าซมีเทนและฝุ่นถ่านหินที่เพิ่มขึ้น การควบคุมกลไกดังกล่าวดำเนินการโดยใช้รีโมทคอนโทรลแบบพกพา

เครื่องจักรหัวตัดและตัด Ural-61 เป็นอุปกรณ์กำลังสูงที่ออกแบบมาสำหรับการสร้างงานเตรียมการของโครงแบบโค้ง โมเดลนี้เป็นที่ต้องการเนื่องจากความสามารถในการขุดห้องที่มีโพแทสเซียม กลไกนี้ได้รับการออกแบบมาให้ทำงานในสภาพอากาศที่อบอุ่นที่อุณหภูมิแวดล้อม +5 ... +35 ° C
Joy roadheader ได้รับการออกแบบมาเป็นพิเศษสำหรับเหมือง Kuzbass การใช้กลไกการเจาะแบบกึ่งอัตโนมัติและระบบดูดฝุ่นสามารถเพิ่มความปลอดภัยและความสะดวกสบายในการทำงาน อุปกรณ์นี้เพิ่มผลผลิตเป็นสี่เท่าของการทำเหมือง
ดู " ข้อดีของรถเกี่ยวข้าวราคาถูก Sampo 130 และ 500

หัวถนน 1GPKS ที่ผลิตโดยสถาบันสร้างเครื่องจักรของเมือง Kopeysk เป็นของรุ่นที่ต้องการ กลไกนี้มีจุดประสงค์เพื่อทำลายและบรรจุหินเมื่อทำงานบนระนาบแนวนอนและแนวลาดเอียงสูงถึง 12 ° ในเทคโนโลยีขั้นสูง ความชันเพิ่มขึ้นเป็น 25

เครื่องผสม KP-21 ได้รับรางวัลสูงจากนิทรรศการระดับนานาชาติ ซึ่งต้องขอบคุณคุณสมบัติทางเทคนิคของตัวเองที่สามารถทำลายและขนถ่ายทิวเขาได้เมื่อทำงานในเครื่องบินหลายลำ อุปกรณ์พิเศษในประเทศรุ่นนี้แพร่หลายในตลาดต่างประเทศ
ราคาและรีวิว
อุปกรณ์พิเศษประเภทนี้ต้องการต้นทุนวัสดุที่สำคัญสำหรับการซื้อ ความเป็นไปได้ของการเช่าช่วยให้คุณลดความสูญเสียทางการเงิน ลดความจำเป็นในการปรับแต่งเพิ่มเติม รวมถึงการตรวจสอบและซ่อมแซมทางเทคนิคให้เสร็จสิ้นในเวลาที่เหมาะสม การบำรุงรักษาอุปกรณ์ การฝึกอบรมบุคลากร ราคาเช่าแตกต่างกันไปขึ้นอยู่กับปริมาณและระยะเวลาของงานที่จะทำ บริษัทเฉพาะทางหลายแห่งเสนอเงื่อนไขพิเศษและโปรแกรมพิเศษที่อนุญาตให้คุณเช่าเครื่องเก็บเกี่ยวตามเงื่อนไขที่ดี

Ivan Pashkov อายุ 42 ปี Kemerovo: “การทำงานร่วมกับ KP-21 roadheader ฉันสามารถพูดได้ว่าเครื่องนี้มีความน่าเชื่อถือ ช่วยให้คุณรับมือกับงานได้อย่างรวดเร็วและมีประสิทธิภาพ เทคนิคนี้ช่วยให้สามารถสร้างโครงสร้างใต้ดินรวมทั้งในระนาบเอียงได้ "
Dmitry Mikhailov อายุ 31 ปี Leninsk-Kuznetsky: “อุปกรณ์พิเศษการขุดที่เราใช้ในการพัฒนาใบหน้านั้นโดดเด่นด้วยความสามารถในการทำงานในสภาวะต่างๆ ความคล่องแคล่ว และความเรียบง่ายที่สร้างสรรค์ กลไกดังกล่าวที่หลากหลายคือหัวรถจักร P-110 ซึ่งไม่เคยทำให้เราผิดหวังตลอดอายุการใช้งาน "
ความสมบูรณ์ของขั้นตอนแรกของการเปลี่ยนแปลงโครงสร้างในอุตสาหกรรมการขุดของสหพันธรัฐรัสเซียนั้นโดดเด่นด้วยการเปลี่ยนแปลงในการก่อตัวของทรัพยากรทางการเงิน ตอนนี้สิ่งนี้เกิดขึ้นเฉพาะผ่านการขายผลิตภัณฑ์อุตสาหกรรม
ที่หลงเหลืออยู่ในอดีตคือช่วงที่ปริมาณการผลิตลดลงเป็นเวลานานในระหว่างการปรับโครงสร้างอุตสาหกรรม ในช่วงไม่กี่ปีที่ผ่านมา เราสามารถสังเกตแนวโน้มการเติบโตที่ชัดเจนของการขุด และการเปลี่ยนแปลงที่ดีขึ้นในตัวชี้วัดทางเทคนิคและเศรษฐกิจของการพัฒนา ของอุตสาหกรรมเหมืองแร่ รัฐบาลของประเทศได้นำ "ยุทธศาสตร์พลังงาน
รัสเซียเป็นระยะเวลาถึงปี 2020” ซึ่งกำหนดภารกิจในการเพิ่มปริมาณการผลิตถ่านหินเป็น 410-450 ล้านตันต่อปีและเพิ่มส่วนแบ่งของถ่านหินในการผลิตไฟฟ้าจาก 34 เป็น 44%
เพื่อให้บรรลุภารกิจเชิงกลยุทธ์นี้ภายในเวลาที่กำหนด จำเป็นต้องเพิ่มกำลังการผลิตขององค์กรอุตสาหกรรมอย่างมีนัยสำคัญ
สิ่งนี้สามารถทำได้โดยการปรับปรุงให้ทันสมัยขององค์กรที่มีอยู่ตลอดจนการสร้างองค์กรใหม่ ในขณะเดียวกัน โครงการของรัฐบาลได้เพิ่มขีดความสามารถจนถึงปี 2553 ผ่านการปรับปรุงทางเทคนิค และในช่วงปี 2554-2563 ควรมีลักษณะเฉพาะโดยการเปลี่ยนแปลงที่รุนแรงในระดับเทคนิคของกระบวนการผลิตเอง
จากประสบการณ์ขั้นสูงจากต่างประเทศแสดงให้เห็นว่า การทำเหมืองถ่านหินที่มีประสิทธิภาพสูงสามารถทำได้โดยมุ่งเน้นการผลิตที่เหมืองที่มีแนวโน้มดี กระบวนการนี้ขึ้นอยู่กับการปรับอุปกรณ์ทางเทคนิคของสถานที่บำบัด ซึ่งนำไปสู่การเปลี่ยนแปลงครั้งใหญ่ในงานเตรียมการ
ซึ่งหมายความว่า ประการแรก เหตุการณ์ดังกล่าวควรส่งผลต่อวิธีการเก็บเกี่ยวที่ก้าวหน้าที่สุด ทุกวันนี้ การขับเคลื่อนแบบผสมผสานที่บริษัทถ่านหินชั้นนำของ Kuzbass ครอบคลุมถึง 98% ของปริมาณงานทั้งหมด
ในสวนอุปกรณ์ทำเหมืองของอุตสาหกรรมถ่านหินของสหพันธรัฐรัสเซีย มีรถหัวลากมากถึง 400 หัว ซึ่งประมาณ 250 คันตั้งอยู่ใน Kuzbass มวลหลักประกอบด้วยส่วนผสมประเภท GPKS ที่ผลิตโดยโรงงานสร้างเครื่องจักร Kopeysk การวิเคราะห์สถานะของอุปกรณ์ขุดอุโมงค์ สามารถระบุระดับเทคนิคของกองเครื่องจักรที่ลดลงอย่างต่อเนื่อง
การเสื่อมสภาพของคนงานเหมืองในบริษัทถ่านหินรายใหญ่เป็นสัญญาณเตือนถึงการหยุดชะงักของงานเตรียมการที่เพิ่มขึ้นเรื่อยๆ
เครื่องมุ่งหน้า GPKS

ผลิตโดยโรงงานสร้างเครื่องจักร Kopeysk จุดประสงค์คือการทำลายด้วยเครื่องจักรและการบรรจุมวลหินระหว่างการขุดถ่านหินและหินในแนวราบและแนวเอียง การรวม 1GPKS-00 ในรุ่นพื้นฐานนั้นมีไว้สำหรับการทำงานในแนวนอนและแนวลาดเอียงโดยมีความชันสูงถึง ± 12 ° ในการดัดแปลงล่าสุดของชุดรวมนั้น อุปกรณ์ต่างๆ ได้ถูกจัดเตรียมไว้แล้วซึ่งสามารถจับชุดรวมบนทางลาดได้สูงถึง ± 25 °
กองเรือโรดเฮดเดอร์ในอุตสาหกรรมถ่านหินของรัสเซียส่วนใหญ่ติดตั้งโรดเฮดเดอร์ของรุ่น GPCS โดยเฉพาะอย่างยิ่งใน Kuzbass มากถึง 97% ของจำนวนรถหัวถนนทั้งหมด
โร้ดเฮดเดอร์ P 110

ผสมผสานกับการคัดเลือกการกระทำ มีบูมทำงาน รวมกันจะใช้สำหรับการทำลายด้วยยานยนต์ด้วยการขนส่งมวลหินที่ตามมา ใช้เมื่อจำเป็นต้องสร้างอุโมงค์โค้ง สี่เหลี่ยมคางหมู หรือสี่เหลี่ยม โดยมีพื้นที่หน้าตัด 7 ถึง 25 ตร.ม. การขับขี่สามารถทำได้ด้วยความลาดเอียง± 12 °ในถ่านหินหรือหน้าผสมที่มีความแข็งแรงของหินสูงสุด 95 MPa (f = 7) และการเสียดสีประมาณ 15 มก. ในเหมืองซึ่งอาจมีอันตรายจากการปนเปื้อนของก๊าซและฝุ่นละออง
โรดเฮดเดอร์ KP 21

ผลิตโดยโรงงานสร้างเครื่องจักร Kopeysk ตั้งแต่ปี 2543 ในช่วงที่ผ่านมา มีเพียงความคิดเห็นเชิงบวกเท่านั้นที่ได้รับเกี่ยวกับงานของมัน ผลงานที่ยอดเยี่ยมของเขาได้รับการชื่นชมทั้งในรัสเซียและต่างประเทศ Roadheaders KP21 ได้รับการออกแบบสำหรับกลไกการทำลายล้างและการขนส่งมวลหินในเวลาต่อมาเมื่อมีการทำงานของทุ่นระเบิดในแนวราบและแนวลาดเอียง
รวม KP21 ได้รับการนำเสนอในนิทรรศการระดับนานาชาติจำนวนมากและได้รับรางวัลสมควร ในฐานะหนึ่งในนิทรรศการที่ดีที่สุด เขาได้รับประกาศนียบัตรและเหรียญรางวัลจากนิทรรศการที่จัดขึ้นเมื่อเดือนมิถุนายนที่เมืองโนโวคุซเนตสค์
OJSC “KMZ” และบริษัทขนาดใหญ่ของอิหร่าน “Sabir” ได้ก่อตั้งความร่วมมือที่มีประสิทธิผล ในเดือนมีนาคมปีที่แล้ว ตามคำสั่งจากบริษัทนี้ มีการผลิตและจัดส่งหัวต่อ KP21 จำนวน 2 ชุดไปยังอิหร่าน
โร้ดเฮดเดอร์ KSP 32

การรวมส่วนหัวของชุดกลาง KSP-32 มีไว้สำหรับการทำลายด้วยกลไกและการขนส่งมวลหินในเวลาต่อมาจากสถานที่ทำงานของเหมืองในแนวนอนและเอียงได้ถึง ± 12 องศา
หน้าตัดของงานสามารถเข้าถึงได้ถึง 33 ตร.ม. ม. กับถ่านหินที่จมและในหน้าผสม อนุญาตให้ทำงานภายใต้สภาวะที่มีความแข็งแกร่งสูงสุดของหินที่ถูกทำลายได้สูงถึง 95 MPa (f = 8) และมีค่าการเสียดสีสูงถึง 15 มก. ในเหมืองที่อาจมีอันตรายจากการปนเปื้อนของก๊าซ (มีเทน) และฝุ่นถ่านหิน
รถบังคับบนถนน KSP-32 ถูกควบคุมจากรีโมทคอนโทรลแบบพกพา รถเกี่ยวข้าวได้รับการออกแบบและผลิตในปี 1998 ที่โรงงานสร้างเครื่องจักร Yasinovatskiy ในเมืองโดเนตสค์
Roadheader KPD

มีไว้สำหรับการทำลายหิน ตามด้วยการทำความสะอาดและการขนส่งมวลหินที่ถูกทำลายไปพร้อมกับขับเคลื่อนการพัฒนา ภาพตัดขวางของชิ้นงานสามารถโค้งงอ, สี่เหลี่ยมคางหมูและสี่เหลี่ยมในส่วนตัดขวางจาก 11 ถึง 25 m2
คุณสมบัติการออกแบบที่ครอบครองโดยเครื่องเกี่ยวนวดคือร่างกายผู้บริหารแบบยืดไสลด์แบบกวาดซึ่งแกนของการหมุนด้านข้างอุปกรณ์นี้ช่วยให้คุณสามารถทำลายหินได้อย่างมีประสิทธิภาพและในขณะเดียวกันก็ทำให้มั่นใจได้ถึงตำแหน่งที่มั่นคงของเครื่องเก็บเกี่ยว
มีตัวเลือกสำหรับการติดตั้งมอเตอร์ไฟฟ้าที่มีกำลังต่างกันบนตัวผู้บริหารซึ่งช่วยให้สามารถเลือกโหมดการตัดที่คุ้มค่าที่สุดขึ้นอยู่กับความแข็งแกร่งของหินที่จะถูกทำลาย
ตัวโหลดที่ทำในรูปของดาวที่พรวนดินมีความเข้มในการโหลดสูงจึงสามารถทำงานได้อย่างมีประสิทธิภาพในการทำงานที่มีการรดน้ำ
โร้ดเฮดเดอร์ EBZ 160

ใช้สำหรับทำงานในเหมืองถ่านหิน หน้าผสม พวกเขายังใช้สำหรับการขุดอุโมงค์ เมื่อขับอุโมงค์และทำลายตะเข็บถ่านหิน สภาวะที่เหมาะสมที่สุดสำหรับผู้ตัดเฉือนจะถือว่ามีความแข็งของหินสูงถึง 75 MPa
ภายใต้เงื่อนไขเหล่านี้ การรวมกันจะแสดงผลลัพธ์สูงสุดในการตัด การบรรทุก และการขนส่งหิน หัวถนนมีรูปแบบที่ยอดเยี่ยม ซึ่งให้จุดศูนย์ถ่วงต่ำ ระบบควบคุมที่สะดวก และทำงานในการจลาจลได้อย่างน่าเชื่อถือ
โรดเฮดเดอร์ของจีน
ในยูเครน บริษัทโดเนตสค์ DTEK และ บริษัท SANY Heavy Equipment Co., Ltd (จีน) ของจีนได้ลงนามในบันทึกข้อตกลงซึ่งทั้งสองฝ่ายได้แสดงความเข้าใจและความตั้งใจร่วมกันในการจัดหาอุปกรณ์การทำเหมืองและเทคโนโลยีการทำเหมืองถ่านหินล่าสุดให้กับยูเครน เอกสารที่ลงนามยังกำหนดพื้นที่ลำดับความสำคัญของความร่วมมือซึ่งจะประกอบด้วยการจัดหาอุปกรณ์และเทคโนโลยีขั้นตอนการให้การรับประกันและบริการบำรุงรักษาได้รับการตกลง ภายในปี 2014 มีการวางแผนที่จะซื้ออุปกรณ์ทำความสะอาดและหัวรถจักรหลายสิบคัน
ในงานแถลงข่าว ตัวแทนของ SANY Heavy Equipment เน้นย้ำว่ารถโรดเฮดเดอร์ชาวจีนหลายคนกำลังปฏิบัติการอยู่ที่เหมืองของบริษัท Donbass และได้แสดงผลลัพธ์ที่ดีในสภาพของ Donbass
Andrei Smirnov พูดในงานแถลงข่าวเดียวกันในนามของคณะกรรมการ DTEK อธิบายว่าพร้อมกับการซื้ออุปกรณ์ในประเทศ เนื่องจากการผลิตถ่านหินที่เพิ่มขึ้นอย่างมาก คณะกรรมการ DTEK ก็ตัดสินใจซื้อรถบดถนนของจีนด้วย A. Smirnov อธิบายการตัดสินใจนี้โดยข้อเท็จจริงที่ว่าอุปกรณ์ที่วางแผนไว้สำหรับการซื้อนั้นมีความโดดเด่นด้วยความน่าเชื่อถือ ความปลอดภัย และการใช้คอมพิวเตอร์ในระดับที่ค่อนข้างสูง ซึ่งไม่มีการรวมในประเทศ ทรัพยากรซึ่งประกาศโดยผู้ผลิตจีนสำหรับอุปกรณ์ของตนนั้นสูงกว่าการรวมในประเทศ 30-50% และระยะเวลาการรับประกัน 20 เดือนซึ่งแสดงให้เห็นว่าผู้ผลิตจีนมั่นใจในคุณภาพของเครื่องจักรอย่างไร
โร้ดเฮดเดอร์ JOY

ตั้งแต่ปี 2548 ผู้บุกเบิก JOY ใหม่เริ่มมาถึงเหมืองของ OJSC SUEK เครื่องผสมรุ่นนี้ได้รับการออกแบบมาโดยเฉพาะสำหรับการทำงานในสภาพของเหมือง Kuzbass
รถเกี่ยวนวดได้รับการติดตั้งแท่นขุดเจาะแบบกึ่งอัตโนมัติในประเภท HFX ซึ่งทำให้สามารถละทิ้งวิธีการขุดเจาะแบบดั้งเดิมด้วยแท่นขุดเจาะแบบแมนนวลได้ และเพิ่มระดับความปลอดภัยในการทำงาน ตั้งแต่ปี 2008 ระบบดูดฝุ่นได้ปรากฏขึ้นบนรถผสมใหม่ ซึ่งสร้างสภาวะที่สะดวกสบายยิ่งขึ้นสำหรับผู้ควบคุมเครื่องผสม
JOY roadheader ช่วยให้บริษัทเพิ่มความเร็วของการทำงานที่เหมืองได้สามถึงสี่เท่าเมื่อเทียบกับค่าเฉลี่ยต่อลูกเรือ ในอนาคตอุปกรณ์ของคลาสนี้จะช่วยเพิ่มระดับการเตรียมหน้าหักบัญชี - สูงถึง 1,000 เมตรต่อเดือนต่อกองพลน้อย
ผลการวิจัยอุตสาหกรรมเกี่ยวกับความน่าเชื่อถือของการทำเหมืองรวมของการดำเนินการคัดเลือก
A.S. Nosenko, A.A. Domnitsky, I.A.Nosenko
Shakhty Institute (สาขา) YRSPU (NPI) ตั้งชื่อตาม M.I. Platova
บทคัดย่อ: บทความนำเสนอผลการวิจัยอุตสาหกรรมเกี่ยวกับความน่าเชื่อถือของเครื่องตัดหญ้า KP21 ที่ผลิตโดยโรงงานสร้างเครื่องจักร OJSC Kopeysk ในสภาพของเหมือง Almaznaya ของ Gukovugol Management Company เมื่อดำเนินการเตรียมการโดยมีหน้าตัดไม่เกิน 16 ตร.ม. มีความแข็งของหินล้อมรอบมากถึง 7 ยูนิต ในระดับศาสตราจารย์ MM Protodyakonov การใช้เครื่องมือทางคณิตศาสตร์ กำหนดความคาดหวังทางคณิตศาสตร์ ความแปรปรวน ส่วนเบี่ยงเบนมาตรฐาน สัมประสิทธิ์การแปรผัน ฯลฯ
คำสำคัญ: ตัวตัดการขุดของการดำเนินการคัดเลือก ความน่าเชื่อถือ เวลาทำงานต่อความล้มเหลว
เครื่องเจาะถนนของ KP21 แบบคัดเลือก (รูปที่ 1) ของการผลิตในประเทศใช้สำหรับการขุดความเร็วสูงที่มีหน้าตัดสูงถึง 30 ม. สำหรับหินที่มีความแข็งแกร่ง 7-10 หน่วย ในระดับศาสตราจารย์ MM โปรโตไดโคนอฟ ใช้ในการก่อสร้างอุโมงค์ขนส่งโดยเฉพาะ ความแตกต่างระหว่างรุ่นที่กำลังพิจารณากับรุ่นก่อนหน้านี้คือการใช้ระบบขับเคลื่อนไฮดรอลิก ซึ่งสำคัญมาก
ในภูมิภาค Donbass ตะวันออก บริษัท Gukovugol ใช้หัวถนน KP21 เป็นครั้งแรกเมื่อดำเนินการดริฟท์ขนส่งหมายเลข 109 ซึ่งมีความยาว 1200 เมตรที่เหมือง Almaznaya
ตาม "วิธีการจัดระเบียบการรวบรวมและวิเคราะห์ข้อมูลเกี่ยวกับประสิทธิภาพของอุปกรณ์ขุดใน Donbass ของรัสเซีย" โดย Shakhty Institute (สาขา) ของ YRSPU (NPI) ตั้งชื่อตาม M.I. Platov ร่วมกับ OJSC "KMZ" ได้ทำการวิจัยอุตสาหกรรมเพื่อรับข้อมูลเกี่ยวกับการดำเนินงาน
การสังเกตได้ดำเนินการเป็นเวลา 20 เดือน ในระหว่างรอบระยะเวลารายงาน 2
ทำงานที่มีความยาว 2200 เมตร (30,000 เมตร) และ 1200 เมตร (17450 ม.) อัตราการเจาะ 252 ม. / เดือน โดยทั่วไป มีการเปิดเผยความล้มเหลว 100 รายการสำหรับการรวมกัน
ข้าว. 1. - โร้ดเฮดเดอร์ KP21
ที่ร้ายแรงที่สุดคือ: การคลายหัวของสลักเกลียวสำหรับยึดครีบของเบรกมงกุฎ, ความล้มเหลวของตลับลูกปืนของกระปุกเกียร์ของแขนพรวนดินและร่างกายการทำงาน, การแตกหักของดาวลำเลียง, การสึกหรอของแผ่นหมุน ส่วนหนึ่งของสายพานลำเลียง
ระหว่างการทำงานของรถเกี่ยวข้าว มีการตัดหินหลังคาที่มีความแข็งแรงสูงถึง 12 ยูนิต ซึ่งส่งผลกระทบต่อทรัพยากรของรถเกี่ยวข้าว การกระจายจำนวนความล้มเหลวตลอดระยะเวลาการทำงานของการรวมแสดงในแผนภาพ (รูปที่ 2)
จากการวิเคราะห์ข้อมูลที่ได้รับ เวลาในการดำเนินการจนถึงความล้มเหลวจึงถูกกำหนด รวมถึงรายการชิ้นส่วนและส่วนประกอบที่ส่งผลต่อความน่าเชื่อถือของเครื่องเก็บเกี่ยว (ตารางที่ 1)
ผลการวิจัยเป็นพื้นฐานสำหรับการปรับปรุงเครื่องจักรทำเหมืองขนาดมาตรฐานนี้ต่อไป เบรกคัตเตอร์เสริมแรง การออกแบบใหม่ของชิ้นส่วนพรวนดินได้รับการพัฒนา โดยแทนที่แขนพรวนดินด้วยจานแบบร่อง เลย์เอาต์ของกระปุกเกียร์ของช่วงล่างมีการเปลี่ยนแปลง พิจารณาการใช้งานแบบผสมผสานกับตัวบรรจุกระสุนใหม่
ข้าว. 2. - การกระจายจำนวนความล้มเหลวในการรวมกันแยกตามชิ้นส่วน
ตารางที่ 1 ตัวบ่งชี้ความน่าเชื่อถือของหัว KP21 รวม หมายเลข 20
การประกอบ ล้มเหลว ปริมาณ เวลาใช้งาน สูงถึง
โหนดของความล้มเหลว 3 ความล้มเหลว m
ตัวลดการทำงาน: แบริ่งหมายเลข 2 14000
คลัตช์เบรค 4 7500
มอเตอร์ไฟฟ้า 3 9000
กำลังโหลดกระปุกเกียร์:
ลูกปืนเบอร์ 7612, 8 6000
เพลาเฟืองหมายเลข 0202087,
ล้อเอียง 2 27500
№ 0202009 2 24000
แบริ่งแอก 1 29000
ลดสายพานลำเลียง:
แบริ่งหมายเลข 7610 3 9000
ดาว 2PNB2.13.86.220-01 2 20000
โซ่ขูด 2 19000
Stav แผ่น 6 12000
ช่วงล่าง รางโซ่ 3 19000
ไดรฟ์ไฮดรอลิก แจ็คกล้องโทรทรรศน์ 6 19000
ท่อแรงดันสูง 9 21000
ท่อโลหะ 5 12000
มอเตอร์ไฮดรอลิก 1 27000
พารามิเตอร์ทางสถิติที่ได้รับใช้ในการคำนวณค่าสุ่มของเวลาปฏิบัติการที่ล้มเหลว สภาพการทำงานของสารผสมแสดงไว้ในตารางที่ 2
ตารางที่2
สภาพการทำงานของเครื่องผสม KP21
№ p / p หมายเลขซีเรียล № ระยะเวลาสังเกตการผลิต เดือน ขนาดงานหยาบ/ใน 2 เบา ม. ความแข็งของหิน หน่วย
1 KP-21 หัวหน้า เบอร์ 20 ดริฟท์สายพานลำเลียง เบอร์ 109 7 15.9 / 13.5 2 - 5/7
2 KP-21 หัวหน้า เบอร์ 34 ดริฟท์สายพานลำเลียง เบอร์ 113 20 16.0 / 15.2 2 - 5/7
ความล้มเหลวที่สอดคล้องกับแต่ละหน่วยของการรวมที่ตรวจสอบแต่ละรายการแสดงไว้ในรูปที่ 3
ดังที่เห็นได้จากไดอะแกรมด้านบน ความล้มเหลวจำนวนมากเป็นของตัวโหลดและมีจำนวนถึง 40% องค์ประกอบที่อ่อนแอที่สุดในแง่ของความน่าเชื่อถือคือหมุดโซ่ (80%) และเฟืองขับ (90%) จุดอ่อนของตัวโหลดคือกระปุกเกียร์ (85%) ในแชสซี ความล้มเหลวหลักคือแทร็ก (90%) ตัวเครื่องทำงานมีแม่แรงไฮดรอลิกที่ยังไม่เสร็จและเบรกบูมกล้องดูดาว (70%)
การวิเคราะห์ทางสถิติของผลลัพธ์ที่ได้จากการสังเกตประสิทธิภาพของการรวม KP21 ได้จัดทำขึ้นตามคำแนะนำ
จากข้อมูลการทดลองที่ได้รับ ชุดทางสถิติของตัวแปรสุ่ม (RV) ได้ถูกสร้างขึ้นจาก 83 realizations X เวลาปฏิบัติการไปสู่ความล้มเหลว โดย Xtp = 23.0 r.m., Xmax = 177.4 r.m. ในกรณีนี้ A1 = 10; k = 18.
สำหรับแต่ละช่วงเวลาจะคำนวณดังนี้: n คือจำนวนค่าของการสุ่ม
ค่าที่อยู่ในช่วง: u / n - ความถี่, ^ - - สะสม
ความถี่ p / pL1 - ความหนาแน่นของความน่าจะเป็นเชิงประจักษ์, p.m-1
ข้าว. 3. - การกระจายความล้มเหลวตามส่วนของหัวถนน KP-21 ก) - รวม KP-21 หมายเลข 20; b) - รวม KP-21 # 34; 1 - ตัวผู้บริหาร, 2 - ส่วนพรวนดิน, 3 - สายพานลำเลียง, 4 - สปริง, 5 - ช่วงล่าง
เป็นผลให้คำนวณค่าเบี่ยงเบนมาตรฐานทางสถิติของ SW: cx "= 32.2 r.m. และค่าสัมประสิทธิ์การแปรผัน y / = 0.79
รูปที่ 4 แสดงไดอะแกรมของความหนาแน่นของการกระจาย SW ในกรณีที่ไม่ทราบรูปแบบของฟังก์ชันการกระจายทางทฤษฎี
ไดอะแกรมทำหน้าที่เป็นพื้นฐานสำหรับกำหนดฟังก์ชันการแจกแจงทางทฤษฎี
ข้าว. 4. - ฮิสโตแกรมของการแจกแจงแบบเลขชี้กำลัง
/ (X) = 0.025 e "" CB เวลาทำงานล้มเหลว
จากการประมวลผลผลลัพธ์ที่ได้รับ พบว่าค่าสุ่มของเวลาปฏิบัติการถึงความล้มเหลว X ของโร้ดเฮดเดอร์เป็นไปตามกฎหมายการแจกแจงแบบเอ็กซ์โพเนนเชียล
ความหนาแน่นของความน่าจะเป็นของตัวแปรสุ่มภายใต้กฎการแจกแจงแบบเอ็กซ์โพเนนเชียลอธิบายโดยนิพจน์:
รับค่า mx = 41 r.m. จากการคาดหมายทางคณิตศาสตร์ เราจะได้ / (X) = 0.025 e -0 "025X.
จากการศึกษาและการคำนวณ เส้นโค้งการกระจายการปรับระดับได้ถูกสร้างขึ้น (รูปที่ 6) ซึ่งเป็นกราฟของฟังก์ชันทางทฤษฎี f (X)
ในการสร้างความสอดคล้องของสมมติฐานที่เสนอต่อวัสดุทางสถิตินั้นใช้เกณฑ์ข้อตกลงของ K. Pearson x ซึ่งคำนวณโดยสูตร:
โดยที่ k คือจำนวนช่วง C, ni คือจำนวนค่า RV ในช่วงที่ i-th, n คือจำนวนทั้งหมดของค่า RV ที่ได้รับ pi คือความน่าจะเป็นทางทฤษฎีที่ RV จะชนในช่วงที่ i-th
ข้าว. 5. - กราฟของฟังก์ชันทางทฤษฎี f (X) = 0.0244-e - "
ความน่าจะเป็น p = 0.01 ที่ได้รับจากการคำนวณก็เพียงพอแล้ว (p<0,1). Таким образом, считаем, что экспериментальные данные удовлетворяют принятому закону распределения СВ.
วรรณกรรม
1. Nosenko A.S. , Domnitsky A.A. , Kargin R.V. , Shemshura E.A. เกี่ยวกับการเลือกชุดอุปกรณ์สำหรับการก่อสร้างอุโมงค์ขนส่งโดยวิธีรวม // ถนนและสะพาน: การรวบรวมบทความ ทางวิทยาศาสตร์ ท. / FSBI "รอสดอร์นี" ม., 2557 ครั้งที่ 32/2. ส. 40-54.
2. Khazanovich G.Sh. , Lyashenko Yu.M. , Nosenko A.S. , Ostanovskiy A.A. , Nikitin E.V. การพัฒนาระบบไฮดรอลิกโหลดและขนส่ง
โมดูลของเครื่องขุด // ปัญหาทางวิทยาศาสตร์และทางเทคนิคของการสร้างปล่องแนวตั้ง, ระยะใกล้เพลา, งานแนวนอนและแนวเอียง: การรวบรวมบทความ ทางวิทยาศาสตร์ ท. / JSC "Rostovshakhtostroy", Novocherk สถานะ เทคโนโลยี ยกเลิก โนโวเชอร์คาสค์: NSTU, 1998.S. 159-164
3. Nosenko A.S. , Kargin R.V. , Khazanovich V.G. , Nosenko V.V. การพัฒนาโมดูลไฮดรอลิกสำหรับระบบโหลดและขนส่ง // อุปกรณ์ขุดและเครื่องกลไฟฟ้า. 2552 หมายเลข 4 ส. 13-16.
4. Nosenko A.S. กระบวนการทำงาน พารามิเตอร์ และประสิทธิภาพของรถตักทุ่นระเบิดพร้อมระบบขับเคลื่อนไฮดรอลิก: ... ดร.เทค. วิทยาศาสตร์: 05.05.06. โนโวเชอร์คาสค์ 2000.27 น.
5. Nosenko A.S. , Khazanovich V.G. , Nosenko V.V. , Shemshura E.A. การเลือกชุดอุปกรณ์สำหรับดำเนินการเตรียมการโดยพิจารณาจากตัวชี้วัดความน่าเชื่อถือที่แท้จริง // อุปกรณ์การขุดและระบบเครื่องกลไฟฟ้า 2552 หมายเลข 7 ส. 8-11.
6. เชมชูรา อี.เอ. วิธีเพิ่มประสิทธิภาพระบบปฏิบัติการของอุปกรณ์ขุด // Engineering Bulletin of the Don, 2013 ลำดับที่ 4 URL: ivdon.ru/magazine/archive/n4y2013/2001
7. Klyuchnikova O.V. , Shapovalova A.G. , Tsybulskaya A.A. หลักการพื้นฐานของการเลือกประเภทและจำนวนเครื่องจักรก่อสร้างสำหรับการผลิตที่ซับซ้อน // Engineering Bulletin of the Don, 2013, No. 4 URL: ivdon.ru/magazine/archive/n4y2013/2064
8. สิทธิบัตรเลขที่ 2108954 RF, MKI V65025 / 08. สายพานลำเลียงสำหรับการขนส่งวัสดุที่หลวมและเป็นก้อน / G.Sh. Khazanovich, อ. โนเซนโกะ, ยูเอ็ม Lyashenko, R.V. คาร์กิน - สมัครแล้ว. 01/31/96; มหาชน 04/20/98; บูล. ลำดับที่ 11
9. Khazanovich G.Sh. , Kargin R.V. , Nosenko A.S. การสำรวจปั้นจั่นอุโมงค์ที่มีความสูงในการขนย้ายแบบแปรผัน
องค์ประกอบ // ข้อมูลการขุดและการวิเคราะห์ (วารสารวิทยาศาสตร์และเทคนิค) 2544 หมายเลข 11 ส. 204-207.
11. ข้อตกลงหลัก หลอดเลือดแดงจราจรระหว่างประเทศ (AGR) ECE / TRANS / SC 1/384 14 มีนาคม 2551 URL: unece.org/fileadmin/DAM/trans/conventn/ECE-TRANS-SC1-384e.pdf
1. Nosenko A.S. , Domnickij A.A. , Kargin R.V. , Shemshura E.A. Dorogi และ Mosty: trudy FGBU "Rosdornii" มอสโก, 2014. หมายเลข 32/2. หน้า 40-54.
2. Hazanovich G.Sh. , Ljashenko Ju.M. , Nosenko A.S. , Ostanovskij A.A. , Nikitin E.V. ปัญหา Nauchno-tehnicheskiestroitel "stva vertikal" nyh stvolov, okolostvol "nyh dvorov, gorizontal" nyh i naklonnyh vyrabotok: trudy Novocherkassk: NGTU, 1998. หน้า 159-164.
3. Nosenko A.S. , Kargin R.V. , Hazanovich V.G. , Nosenko V.V. อุปกรณ์การขุดและไฟฟ้า. 2552 หมายเลข 4 หน้า 13-16.
4. Nosenko A.S. Rabochie processy, parametry i jeffektivnost "shahtnyh pogruzochnyh mashin s gidravlicheskimi privodami: dis. ... d-r tehn Nauk: 05.05.06. Novocherkassk, 2000.279 p.
5. Nosenko A.S. , Hazanovich V.G. , Nosenko V.V. , Shemshura E.A. อุปกรณ์การขุดและไฟฟ้า. 2552 หมายเลข 7 หน้า 8-11.
6. เชมชูรา อี.เอ. Inzenernyj vestnik Dona (มาตุภูมิ), 2013 หมายเลข 4 URL: ivdon.ru/magazine/archive/n4y2013/2001
7. Kljuchnikova O.V. , Shapovalova A.G. , Cybul "skaja A.A. Inzenernyj vestnik Dona (มาตุภูมิ), 2013, หมายเลข 4 URL: ivdon.ru/magazine/archive/n4y2013/2064
8. สิทธิบัตร #2108954 RF, MKI V65G25 / 08. Konvejer dlja transportirovanija sypuchih และ kuskovyh materialov. G.Sh. ฮาซาโนวิช อ. โนเซนโก, จู. เอ็ม. ยาเชนโก, อาร์.วี. Kargin -Zajavl 31.01.96; 0publ.20.04.98; บจ. ลำดับที่ 11
9. Hazanovich G.Sh. , Kargin R.V. , Nosenko A.S. แถลงการณ์ข้อมูลและการวิเคราะห์การขุด (วารสารวิชาการทางวิทยาศาสตร์) 2544 หมายเลข 11 หน้า 204-207.
10. Directive 2004/54 / EC ของรัฐสภายุโรปและคณะมนตรีเมื่อวันที่ 29 เมษายน 2547 ว่าด้วยข้อกำหนดด้านความปลอดภัยขั้นต่ำสำหรับอุโมงค์ใน URL เครือข่ายถนนทรานส์ยุโรป: bmvit.gv.at/verkehr/strasse/tunnel/downloads/ EURL_200454EGvom762004en .ไฟล์ PDF.
11. ข้อตกลงหลัก International Traffic Arteries (AGR) ECE / TRANS / SC.1 / 384 14 มีนาคม 2551 URL: unece.org/fileadmin/DAM/trans/conventn/ECE-TRANS-SC1-384e.pdf
การดัดแปลงระบบ SEU นี้ได้รับการพัฒนาสำหรับรถหัวลากแบบเลือกรุ่น KP ที่ผลิตโดย Kopeysk Machine-Building Plant JSC
ระบบ SEU M2D เป็นผลมาจากความพยายามลงทุนและประสบการณ์มากมายในระบบปฏิบัติการรุ่นก่อนๆ
ในขณะนี้ ระบบได้รับการติดตั้งแบบอนุกรมที่โรงงานของ JSC "KMZ"
- โร้ดเฮดเดอร์ KP21-14
- โร้ดเฮดเดอร์ KP150
- โร้ดเฮดเดอร์ KP220
ชุดอุปกรณ์ควบคุมที่สมบูรณ์ประกอบด้วยระบบย่อย หน่วยควบคุม แผงควบคุม และแอคทูเอเตอร์ที่จำเป็นทั้งหมด เพื่อให้มั่นใจในการควบคุมไฟฟ้าอิเล็กโตรไฮโดรลิก การจ่ายไฟ และการป้องกันหน่วยและองค์ประกอบต่างๆ ของเครื่องขุด
ในระหว่างการพัฒนา ไม่เพียงเน้นย้ำถึงความปลอดภัยของเครื่องเท่านั้น แต่ยังให้ความสำคัญกับความปลอดภัยของเจ้าหน้าที่ปฏิบัติการและรับประกันการทำงานที่สะดวกสบายด้วย
ส่งผลให้ประสิทธิภาพของการขุดอุโมงค์เพิ่มขึ้น รวมถึงเนื่องจากการหยุดทำงานของอุปกรณ์ในระหว่างการซ่อมแซมที่ไม่ได้กำหนดไว้
ระบบควบคุมไฟฟ้าไฮดรอลิกของ SEU "M2D" มีฟังก์ชันต่อไปนี้ ซึ่งจะอธิบายในรายละเอียดเพิ่มเติมด้านล่าง
- การควบคุมวิทยุระยะไกลของเครื่องเกี่ยวนวด
- รวมการควบคุมจากคอนโซลที่สถานที่ทำงานของคนขับ
- การวินิจฉัยข้อบกพร่องในแต่ละองค์ประกอบของระบบ
- การป้องกันไมโครโปรเซสเซอร์และการควบคุมมอเตอร์ไฟฟ้าของชุดรวม
- ชุดเซ็นเซอร์สำหรับตรวจสอบพารามิเตอร์ที่หลากหลายของการทำงานแบบผสมผสาน
- ระบบการส่งข้อมูลไปยังพื้นผิว การแสดงภาพและสร้างรายงานการวิเคราะห์ ณ ที่ทำงานของผู้จัดส่งเหมืองแร่และคอมพิวเตอร์ของทีมผู้บริหาร
- การเตือนล่วงหน้าและเสียงเตือน
- อื่น
1. แผงควบคุม PU2 SEU2.10.00.000-01
แผงควบคุม PU2 เป็นไมโครคอนโทรลเลอร์ที่มีหน้าจอกราฟิกขนาด 7 นิ้ว แป้นพิมพ์ที่เชื่อถือได้พร้อมหน้าสัมผัสแบบ opto-isolated และหน่วยความจำแบบไม่ลบเลือน PU2 ได้รับการติดตั้งในตลับเทปแบบพิเศษ ซึ่งช่วยป้องกันความเสียหายทางกลได้อย่างน่าเชื่อถือ ลดความซับซ้อน และเพิ่มความน่าเชื่อถือของการติดตั้ง
PU2 ในระบบ M2RD SEU ทำหน้าที่ดังต่อไปนี้:
- การควบคุมอุปกรณ์ผู้บริหารแต่ละชุดจากสถานที่ทำงานของผู้ขับขี่
- การแสดงพารามิเตอร์ของระบบและการแสดงข้อมูลการทำงานบนจอแสดงผล
- การควบคุมและการส่งข้อมูลเกี่ยวกับสถานะของระบบ EMS
- การวินิจฉัยว่ามีความผิดปกติในแต่ละองค์ประกอบของระบบ
- รายการบันทึกเหตุการณ์ รวม ในโหมดกล่องดำ
2. ชุดอุปกรณ์วิทยุควบคุมระยะไกลสำหรับ KADRUK รวม

อุปกรณ์ KADRUK ให้การควบคุมวิทยุระยะไกลของชุดรวมในแนวสายตา ตัวเครื่องของแผงควบคุมวิทยุ RPDU AUK75D.70.200.000 ทำจากไฟเบอร์กลาสที่ทนทาน การรวมกันของจอยสติ๊กและแป้นพิมพ์แบบกดปุ่มช่วยให้ควบคุมอุปกรณ์สำหรับผู้บริหารของชุดคำสั่งผสมได้อย่างสะดวกและง่ายดาย
แบตเตอรี่ RPDU ถูกชาร์จโดยตรงในเหมืองโดยไม่ต้องยก "ขึ้นสู่ผิวน้ำ" เมื่อ RPDU เชื่อมต่อกับสายจัมเปอร์กับ PU2 ในเวลาเดียวกัน RPDU ยังคงทำหน้าที่เป็นรีโมตคอนโทรลแบบมีสาย
นอกจากนี้ เพื่อเพิ่มความปลอดภัยในการดำเนินการขุด RPDU ยังติดตั้งฟังก์ชัน "หยุด" ฉุกเฉินทั่วไปอัตโนมัติในกรณีที่หกล้ม
3. ชุดอุปกรณ์สำหรับติดตั้งใน Control Station
ชุดอุปกรณ์ประกอบด้วยอุปกรณ์เสริมของระบบ ซึ่งสวิตช์และควบคุมหน่วยการทำงานแต่ละหน่วย รวบรวมข้อมูลจากเซ็นเซอร์ต่างๆ ควบคุมการจ่ายไฟของวาล์วไฟฟ้าไฮดรอลิก การจ่ายไฟให้กับระบบ และ ไดรฟ์มอนิเตอร์ MP1

จอภาพไดรฟ์ MP1
จอภาพไดรฟ์ MP1 เป็นอุปกรณ์ที่ใช้ไมโครโปรเซสเซอร์สำหรับควบคุม ตรวจสอบ และป้องกันมอเตอร์ไฟฟ้า MP1 ติดตั้งเซ็นเซอร์กระแสไฟแบบไม่สัมผัสและเชื่อมต่อกับไมโครคอนโทรลเลอร์กลาง (แผงควบคุม PU2) ผ่านอินเทอร์เฟซ CAN แบบดิจิตอล จอภาพไดรฟ์ MP1 มีความสามารถในการตรวจสอบการทำงานของวงจรชุดควบคุมคอนแทคเตอร์สุญญากาศสำหรับการสลับโหมดกระแสไฟ " Afterburner" เป็นกระแส "โฮลดิ้ง" ซึ่งจำเป็นสำหรับคอนแทคเตอร์สุญญากาศที่มีการควบคุมโหมดระบบเครื่องกลไฟฟ้า
ฟังก์ชั่นหลักของมอนิเตอร์ไดรฟ์ MP1:
- การควบคุมกระแสไฟเกินทางเทคโนโลยีของมอเตอร์ไฟฟ้าด้วยการก่อตัวของลักษณะการป้องกัน "กระแสไฟย้อนกลับ" (การตั้งค่าสำหรับการโอเวอร์โหลด, การโอเวอร์โหลดถูกตั้งค่าจากเมนูระบบซึ่งเก็บไว้ในหน่วยความจำแบบไม่ลบเลือนของแผงควบคุม PU2 );
- การปิดมอเตอร์ไฟฟ้าในกรณีที่มีเทคโนโลยีเกินพิกัด
- การจัดเก็บใน "กล่องดำ" แบบเรียลไทม์เกี่ยวกับความสำเร็จของกระแสมอเตอร์ของค่าของการตั้งค่าโอเวอร์โหลดและค่าของกระแสเกินในช่วงระยะเวลาของคุณสมบัติการป้องกัน
- การควบคุมกระแสไฟพลิกคว่ำ (หรือ "ติดขัด") ของมอเตอร์ไฟฟ้าโดยมีลักษณะป้องกันและปิดมอเตอร์ไฟฟ้าในกรณีที่ "พลิกคว่ำ" หรือ "ติดขัด"
- การควบคุมกระแสไหลเข้าพร้อมการบันทึกในหน่วยความจำของ "โปรไฟล์ปัจจุบันที่ไหลเข้า" การกำหนดการเริ่มต้นที่เสร็จสมบูรณ์สำหรับเงื่อนไขต่างๆ ของการสตาร์ทมอเตอร์ไฟฟ้าและการตัดการเชื่อมต่อมอเตอร์ไฟฟ้าก่อนการสตาร์ท "ล้มเหลว"
- การตรวจสอบกระแสไฟลัดที่การเชื่อมต่อขาออก (ในโหลด) ด้วยการปิดมอเตอร์ไฟฟ้าในกรณีที่ "ไฟฟ้าลัดวงจร"
- การตรวจสอบแรงดันไฟฟ้า 3 เฟส (660 / 1140V) ในโหลด การตรวจสอบความไม่สมดุลของเฟสในโหลด ในกรณีที่ "ความไม่สมดุลของเฟสที่อนุญาต" - การส่งสัญญาณและการปิดมอเตอร์ไฟฟ้า
- ตรวจสอบสถานะของเซ็นเซอร์อุณหภูมิ (รีเลย์ความร้อนหรือโพซิสเตอร์) ที่สร้างขึ้นในขดลวดสเตเตอร์และ (หรือ) ส่วนประกอบแบริ่งของมอเตอร์ไฟฟ้าด้วยการตรวจสอบอัตโนมัติของสถานะปิดของสายไปยังเซ็นเซอร์อุณหภูมิและปิดมอเตอร์ไฟฟ้าในกรณีที่ ความร้อนสูงเกินไปของขดลวดและแบริ่ง
- การวัดความต้านทานฉนวนของการเชื่อมต่อขาออกกับคอนแทคเตอร์ (สายไฟและขดลวดสเตเตอร์) ก่อนเปิดโหลด (มอเตอร์ไฟฟ้า) ในขณะที่บันทึกค่าความต้านทานฉนวนที่วัดได้ (30kΩ ... .5MΩ) ในหน่วยความจำโมดูลสำหรับการเปรียบเทียบอัตโนมัติ ด้วยค่า "ตั้งแต่ต้นจนจบ" (การคาดการณ์การเปลี่ยนแปลงความต้านทานฉนวนสำหรับ PPR)
- การป้องกัน "การสตาร์ทบ่อยครั้ง" ตามข้อ จำกัด ที่กำหนดไว้ในข้อกำหนดทางเทคนิคสำหรับมอเตอร์ไฟฟ้า
- การคำนวณอัตโนมัติของพลังงานที่ใช้งานของมอเตอร์ไฟฟ้าขับเคลื่อนโดยคำนึงถึงการคำนวณและการจัดเก็บในหน่วยความจำของการใช้พลังงาน kW * h (การถ่ายโอนข้อมูลไปยังแผงควบคุมหลัก PU2 ของระบบควบคุมไฟฟ้าไฮดรอลิกของ SEU) การบัญชีสำหรับเวลาในการทำงานของไดรฟ์ ("ชั่วโมงเครื่องยนต์" จำนวนรอบการเริ่มต้นรวมถึงรอบที่มีโหลดสูงสุด) พร้อมการตรึงพารามิเตอร์เหล่านี้ในหน่วยความจำแบบไม่ลบเลือนของ MP และระบบ ESS
- ตรวจสอบความสามารถในการซ่อมบำรุงของคอนแทคเตอร์สุญญากาศด้วยการตรวจสอบช่วงเวลาอัตโนมัติสำหรับการเปิดเครื่อง (รวมถึงในโหมด "บังคับ") และปิดตามการทำงานจริงของหน้าสัมผัสเสริมและตามสัญญาณของเซ็นเซอร์ปัจจุบัน (ใน ทั้งสามขั้นตอน);
- การระบุความพยายามที่จะปิดกั้นคอนแทคเตอร์สูญญากาศ "ทางกลไก" ด้วยการรักษาเหตุการณ์นี้ไว้ในระบบ ESP
- การระบุความผิดปกติของชุดควบคุมของคอนแทคเตอร์สูญญากาศที่รับผิดชอบในการเปลี่ยนจากโหมด Afterburner เป็นโหมด "Hold" โดยการวัดกระแสของโหมดบังคับและการสลับโหมดการถือครอง ")
4. ชุดควบคุมไฮดรอลิกไฟฟ้าของชุดรวม

ออกแบบมาสำหรับการควบคุมไฮดรอลิกไฟฟ้าของกลไกหัวถนน: ตัวผู้บริหาร (เคลื่อนที่, เหลื่อม), ป้อน, รวมการเดินทาง, สายพานลำเลียง, ตัวรองรับ, ตัวยก, การบรรทุก
ในระบบ SEU "M2D" นั้น EGR SEU.14.00.000 Electrohydraulic distribution ถูกใช้เป็นวาล์วควบคุมไฟฟ้าไฮดรอลิก ซึ่งเป็นตัวควบคุม electrohydroblock สำหรับ 2 คำสั่ง SEU "M2D" ที่จัดส่งให้กับรถหัวถนน KP21-02, KP21-04, KP21-150, KP220 ตามลำดับประกอบด้วยชุดวาล์วไฮดรอลิกไฟฟ้า 14 ชุด
EGR ถูกควบคุมจากระยะไกลโดยใช้ PU2 Control Panel หรืออุปกรณ์ควบคุมอื่น รวมถึง ตามโปรแกรมและอัลกอริธึมที่กำหนดในโหมดอัตโนมัติหรือในโหมดแมนนวลโดยใช้คันโยกเพื่อเลื่อนหลอดแม่เหล็กไฟฟ้า
5. อุปกรณ์สำหรับควบคุมพารามิเตอร์ของ ACP และอุปกรณ์ตรวจสอบวิทยุ
เป็นชุดของเซ็นเซอร์ดิจิทัลสำหรับรวบรวมข้อมูลเกี่ยวกับสภาพขององค์ประกอบโรดเฮดเดอร์:
- การตรวจสอบแรงดันในสายไฮดรอลิก
- ตรวจสอบตำแหน่งของผู้บริหาร
- ตรวจสอบอุณหภูมิของกระปุกเกียร์ น้ำมัน และองค์ประกอบอื่น ๆ
- การตรวจสอบระดับน้ำมันในกระปุกเกียร์และในถังน้ำมัน
- การตรวจสอบความเข้มข้นของก๊าซมีเทนและก๊าซอื่น ๆ
- อื่น ๆ.
ระบบสามารถใช้ทั้งเซ็นเซอร์แบบมีสายแบบ "คลาสสิก" และอุปกรณ์ตรวจสอบคลื่นวิทยุ ซึ่งเป็นชุดของเซ็นเซอร์ไร้สายที่ส่งผลการวัดผ่านช่องสัญญาณวิทยุไปยังเครื่องอ่านที่ติดตั้งบนชุดรวม (โมเด็มวิทยุ - หน่วยความถี่วิทยุแบบอยู่กับที่ URCHS-JN)
ข้อดีของอุปกรณ์ตรวจสอบวิทยุ:
- ความสามารถในการส่งข้อมูลผ่านช่องสัญญาณวิทยุในระยะทางสูงสุด 30 เมตร
- ไม่มีแหล่งพลังงานภายนอก รองรับแบตเตอรี่
- การไม่มีสายเคเบิลและขั้วต่อซึ่งช่วยให้วางส่วนประกอบของอุปกรณ์ในที่ที่เข้าถึงยาก ป้องกันการแตกในสายสื่อสารและเพิ่มภูมิคุ้มกันทางเสียง
- การควบคุมการวินิจฉัยเต็มรูปแบบซึ่งไม่รวม "การเลียนแบบเซ็นเซอร์";
- ความต้านทานสูงต่อการโอเวอร์โหลด แรงดันตกแบบไดนามิก และการสั่นสะเทือนเนื่องจากคุณสมบัติการออกแบบของเซ็นเซอร์
- การทำให้การติดตั้งง่ายขึ้นอย่างมีนัยสำคัญเนื่องจากไม่มีจัมเปอร์สายเคเบิล

เซ็นเซอร์ความดันวิทยุ DDR1
เซ็นเซอร์วิทยุทั้งหมดมีแหล่งจ่ายไฟแบตเตอรี่ในตัว อายุการใช้งานแบตเตอรี่: 9 เดือน
โมเด็มวิทยุหนึ่งตัว (หน่วยความถี่วิทยุ URCHS-JN) รวบรวมข้อมูลจากเซ็นเซอร์วิทยุ 16 ตัว การส่งข้อมูลจากโมเด็มวิทยุไปยังตัวควบคุมคำสั่ง (แผงควบคุม PU2) ดำเนินการผ่านอินเทอร์เฟซดิจิทัล MODBUS (RS485)
หัวเกี่ยว KP25
การรวมหัวเรื่อง KP25 ได้รับการออกแบบสำหรับกลไกการแตกหักและการโหลดของมวลหินระหว่างการทำงานในแนวนอนและแนวเอียงที่ ± 12 ° ตัวการทำงานที่ได้รับการปรับปรุงของการรวมช่วยให้สามารถใช้พลังของมอเตอร์ไฟฟ้าสองความเร็วได้อย่างมีประสิทธิภาพและการใช้ ระบบจ่ายน้ำไปยังเขตการทำลายล้างร่วมกับการชลประทานภายนอกช่วยลดระดับการผลิตฝุ่นได้อย่างมากซึ่งช่วยปรับปรุงสภาพการทำงานในสถานที่ทำงานของผู้ปฏิบัติงาน การใช้มอเตอร์ไฮดรอลิกเป็นตัวขับเคลื่อนของช่วงล่างและตัวป้อนทำให้สะดวกและความปลอดภัยในการบำรุงรักษาและความน่าเชื่อถือ ระบบไฮดรอลิกของรถเกี่ยวนวดปรับอัตราป้อนของตัวผู้บริหารไปที่ด้านล่างอย่างราบรื่นเนื่องจากการใช้ปั๊มแบบแปรผัน และสถานีสูบน้ำแบบอัตโนมัติอำนวยความสะดวก ส่วนป้อนของตัวป้อนจะโหลดมวลหินลงในรางรับ ของสายพานลำเลียงซึ่งสามารถบรรจุลงในเหมืองด้วยวิธีใดก็ได้ งานติดตั้งส่วนรองรับทำได้สะดวกและปลอดภัยสามารถรื้อถอนรถเกี่ยวข้าวออกเป็นส่วนๆ ได้ สะดวกสำหรับหย่อนลงไปในเหมืองและขนย้ายไปตามการทำงานของเหมือง
ข้อมูลจำเพาะ
|
ประสิทธิภาพทางเทคนิค: |
|
| - สำหรับถ่านหิน m3 / นาที (t / นาที) | 2,4 |
| - ตามสายพันธุ์ STszh<100МПа, м3/мин | 0,2...0,3 |
| แรงดันดินจำเพาะ MPa | 0,12 |
|
แชสซี: |
|
| - หน่วยไดรฟ์ |
ไฮดรอลิค |
| - ความเร็วในการเคลื่อนที่ m3 / นาที | 6 |
| - แรงฉุด t | 36 |
|
ผู้บริหาร ogran: |
|
| - ความเร็วในการตัด m / s | 2 |
| - ความถี่การหมุนของเม็ดมะยม min-1 | 50 |
|
ระบบไฮดรอลิก |
|
| - แรงดันสูงสุดในระบบไฮดรอลิก MPa | |
| - น้ำยาทำงาน | น้ำมันหมวดอุตสาหกรรม |
| - วาล์วไฮดรอลิก | ดำเนินการด้วยตนเอง |
|
ตัวป้อน |
|
| - หน่วยไดรฟ์ | ไฟฟ้า |
| - จำนวนอุ้งเท้าแกว่ง min-1 | 46 |
| - ความกว้างของตัวป้อน mm ขั้นต่ำ | 2200 |
| - ความกว้างของตัวป้อน mm สูงสุด | 3200 |
|
ระบบชลประทาน |
|
| - ความกดดันในการทำงาน MPa | 1,5 |
| - อัตราการไหลสูงสุด l / นาที | 150 |
|
สายพานลำเลียง |
|
| 1,0 | |
| - ความกว้างรางน้ำ mm | 550 |
|
สายพานลำเลียง |
|
| - ความเร็วของโซ่มีดโกน m / s | 1,0 |
| - ความกว้างรางน้ำ mm | 550 |
|
อุปกรณ์ไฟฟ้า |
|
| - แรงดันไฟฟ้าของวงจรไฟฟ้า V | 660
|
| - กำลังทั้งหมดของมอเตอร์ไฟฟ้า kW | 216,5 |
| - กำลังขับกิโลวัตต์ของร่างกายผู้บริหาร | 196,5 |
| - ตัวป้อน | 110/55 |
| - สายพานลำเลียง | 30 |
| - สถานีสูบน้ำ | 55 |
| รวมมวล t ไม่มาก | 40 |