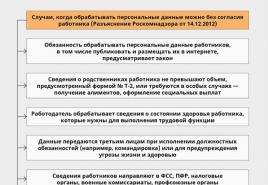
วงโคจรค้างฟ้า “การวัดแสงด้วยดาวเทียม” แนวคิดการใช้อุปกรณ์ประดิษฐ์
ดาวเทียม Earth คือวัตถุใดๆ ที่เคลื่อนที่ไปตามเส้นทางโค้งรอบดาวเคราะห์ ดวงจันทร์เป็นดาวเทียมตามธรรมชาติดั้งเดิมของโลก และมีดาวเทียมเทียมจำนวนมาก ซึ่งโดยปกติจะอยู่ในวงโคจรใกล้โลก เส้นทางที่ตามด้วยดาวเทียมจะเป็นวงโคจร ซึ่งบางครั้งก็เป็นรูปวงกลม
เนื้อหา:
เพื่อทำความเข้าใจว่าทำไมดาวเทียมถึงเคลื่อนที่แบบนั้น เราต้องกลับไปหานิวตันเพื่อนของเรา อยู่ระหว่างวัตถุสองชิ้นใดๆ ในจักรวาล หากไม่ใช่เพราะแรงนี้ ดาวเทียมที่เคลื่อนที่ใกล้ดาวเคราะห์จะยังคงเคลื่อนที่ต่อไปด้วยความเร็วเท่าเดิมและไปในทิศทางเดียวกัน - เป็นเส้นตรง อย่างไรก็ตาม เส้นทางเฉื่อยเป็นเส้นตรงของดาวเทียมนี้มีความสมดุลด้วยแรงดึงดูดอันแรงกล้าที่มุ่งสู่ใจกลางดาวเคราะห์
วงโคจรของดาวเทียมโลกเทียม
บางครั้งวงโคจรของดาวเทียมดูเหมือนวงรี ซึ่งเป็นวงกลมแบนที่เคลื่อนที่รอบจุดโฟกัสสองจุด ใช้กฎการเคลื่อนที่พื้นฐานเดียวกัน ยกเว้นว่าดาวเคราะห์อยู่ที่จุดโฟกัสจุดใดจุดหนึ่ง ส่งผลให้แรงลัพธ์ที่กระทำกับดาวเทียมไม่สม่ำเสมอตลอดวงโคจร และความเร็วของดาวเทียมก็เปลี่ยนแปลงอยู่ตลอดเวลา มันจะเคลื่อนที่เร็วที่สุดเมื่ออยู่ใกล้โลกมากที่สุด ซึ่งเป็นจุดที่รู้จักกันในชื่อเพอริจี และจะเคลื่อนที่ช้าที่สุดเมื่ออยู่ห่างจากโลกมากที่สุด ซึ่งเป็นจุดที่รู้จักกันในชื่อเอโปจี
มีวงโคจรดาวเทียมที่แตกต่างกันมากมายของโลก สิ่งที่ได้รับความสนใจมากที่สุดคือวงโคจรค้างฟ้าเพราะว่าพวกมันหยุดนิ่งเหนือจุดใดจุดหนึ่งบนโลก
วงโคจรที่เลือกสำหรับดาวเทียมเทียมนั้นขึ้นอยู่กับการใช้งาน ตัวอย่างเช่น โทรทัศน์ถ่ายทอดสดใช้วงโคจรค้างฟ้า ดาวเทียมสื่อสารจำนวนมากยังใช้วงโคจรค้างฟ้าอยู่ด้วย ระบบดาวเทียมอื่นๆ เช่น โทรศัพท์ดาวเทียม อาจใช้วงโคจรโลกต่ำ
ในทำนองเดียวกัน ระบบดาวเทียมที่ใช้ในการนำทาง เช่น Navstar หรือ Global Positioning (GPS) มีวงโคจรโลกค่อนข้างต่ำ นอกจากนี้ยังมีดาวเทียมประเภทอื่นๆอีกมากมาย จากดาวเทียมตรวจอากาศไปจนถึงดาวเทียมวิจัย แต่ละคนจะมีประเภทวงโคจรของตัวเองขึ้นอยู่กับการใช้งาน
วงโคจรดาวเทียมโลกจริงที่เลือกจะขึ้นอยู่กับปัจจัยต่างๆ รวมถึงหน้าที่ของมัน และพื้นที่ที่จะให้บริการ ในบางกรณี วงโคจรของดาวเทียมโลกอาจมีขนาดใหญ่ถึง 100 ไมล์ (160 กม.) สำหรับวงโคจรโลกต่ำ LEO ในขณะที่วงโคจรอื่นๆ สามารถเข้าถึงได้มากกว่า 22,000 ไมล์ (36,000 กม.) เช่นเดียวกับในกรณีของวงโคจรโลกต่ำ GEO
ดาวเทียมโลกเทียมดวงแรก
สหภาพโซเวียตปล่อยดาวเทียมโลกเทียมดวงแรกเมื่อวันที่ 4 ตุลาคม พ.ศ. 2500 และเป็นดาวเทียมเทียมดวงแรกในประวัติศาสตร์
สปุตนิก 1 เป็นดาวเทียมดวงแรกจากดาวเทียมหลายดวงที่สหภาพโซเวียตเปิดตัวในโครงการสปุตนิก ซึ่งส่วนใหญ่ประสบความสำเร็จ ดาวเทียม 2 ติดตามดาวเทียมดวงที่สองในวงโคจรและเป็นดวงแรกที่บรรทุกสัตว์ขึ้นเครื่อง ซึ่งเป็นสุนัขตัวเมียชื่อไลกา สปุตนิก 3 ประสบความล้มเหลวครั้งแรก

ดาวเทียมโลกดวงแรกมีมวลประมาณ 83 กิโลกรัม มีเครื่องส่งสัญญาณวิทยุ 2 เครื่อง (20.007 และ 40.002 MHz) และโคจรรอบโลกที่ระยะห่าง 938 กม. จากจุดสุดยอดของมัน และ 214 กม. ที่ขอบโลก การวิเคราะห์สัญญาณวิทยุใช้เพื่อรับข้อมูลเกี่ยวกับความเข้มข้นของอิเล็กตรอนในชั้นบรรยากาศ อุณหภูมิและความดันถูกเข้ารหัสตลอดระยะเวลาของสัญญาณวิทยุที่ปล่อยออกมา ซึ่งบ่งชี้ว่าดาวเทียมไม่ได้ถูกอุกกาบาตทะลุทะลุ
ดาวเทียมโลกดวงแรกเป็นทรงกลมอะลูมิเนียมที่มีเส้นผ่านศูนย์กลาง 58 ซม. มีเสาอากาศที่ยาวและบางสี่อันซึ่งมีความยาวตั้งแต่ 2.4 ถึง 2.9 ม. เสาอากาศดูเหมือนหนวดยาว ยานอวกาศได้รับข้อมูลเกี่ยวกับความหนาแน่นของชั้นบรรยากาศชั้นบนและการแพร่กระจายของคลื่นวิทยุในชั้นบรรยากาศรอบนอก เครื่องมือและแหล่งพลังงานไฟฟ้าถูกเก็บอยู่ในแคปซูลซึ่งรวมถึงเครื่องส่งสัญญาณวิทยุที่ทำงานที่ความถี่ 20.007 และ 40.002 MHz (ความยาวคลื่นประมาณ 15 และ 7.5 ม.) การปล่อยคลื่นเกิดขึ้นในกลุ่มอื่นโดยมีระยะเวลา 0.3 วินาที การวัดและส่งข้อมูลทางไกลภาคพื้นดินรวมข้อมูลอุณหภูมิภายในและบนพื้นผิวของทรงกลม
เนื่องจากทรงกลมเต็มไปด้วยไนโตรเจนที่มีแรงดัน สปุตนิก 1 จึงมีโอกาสตรวจจับอุกกาบาตเป็นครั้งแรก แม้ว่าจะไม่เป็นเช่นนั้นก็ตาม การสูญเสียแรงดันภายในเนื่องจากการทะลุผ่านไปยังพื้นผิวด้านนอก สะท้อนให้เห็นในข้อมูลอุณหภูมิ
ประเภทของดาวเทียมประดิษฐ์
ดาวเทียมประดิษฐ์มีหลายประเภท รูปร่าง ขนาด และมีบทบาทที่แตกต่างกัน

- ดาวเทียมสภาพอากาศช่วยนักอุตุนิยมวิทยาทำนายสภาพอากาศหรือดูสิ่งที่เกิดขึ้นในปัจจุบัน ตัวอย่างที่ดีคือดาวเทียมสิ่งแวดล้อมปฏิบัติการค้างฟ้า (GOES) ดาวเทียมโลกเหล่านี้มักจะมีกล้องที่สามารถส่งภาพถ่ายสภาพอากาศของโลกกลับมา ไม่ว่าจะจากตำแหน่งค้างฟ้าคงที่หรือจากวงโคจรขั้วโลก
- ดาวเทียมสื่อสารอนุญาตให้ส่งข้อมูลการสนทนาทางโทรศัพท์และข้อมูลผ่านดาวเทียม ดาวเทียมสื่อสารทั่วไป ได้แก่ Telstar และ Intelsat คุณลักษณะที่สำคัญที่สุดของดาวเทียมสื่อสารคือทรานสปอนเดอร์ ซึ่งเป็นเครื่องรับวิทยุที่รับการสนทนาด้วยความถี่เดียว จากนั้นจึงขยายและส่งสัญญาณกลับมายังโลกด้วยความถี่อื่น โดยปกติแล้วดาวเทียมจะมีช่องสัญญาณนับร้อยหรือหลายพันช่อง ดาวเทียมสื่อสารมักจะเป็นแบบจีโอซิงโครนัส
- ออกอากาศดาวเทียมส่งสัญญาณโทรทัศน์จากจุดหนึ่งไปยังอีกจุดหนึ่ง (คล้ายกับดาวเทียมสื่อสาร)
- ดาวเทียมทางวิทยาศาสตร์เช่น กล้องโทรทรรศน์อวกาศฮับเบิล ทำหน้าที่ปฏิบัติภารกิจทางวิทยาศาสตร์ทุกประเภท พวกเขามองทุกอย่างตั้งแต่จุดดับดวงอาทิตย์ไปจนถึงรังสีแกมมา
- ดาวเทียมนำทางช่วยเรือและเครื่องบินนำทาง ที่มีชื่อเสียงที่สุดคือดาวเทียม GPS NAVSTAR
- ดาวเทียมกู้ภัยตอบสนองต่อสัญญาณรบกวนวิทยุ
- ดาวเทียมสำรวจโลกตรวจสอบโลกเพื่อดูการเปลี่ยนแปลงในทุกสิ่ง ตั้งแต่อุณหภูมิ ป่าไม้ ไปจนถึงน้ำแข็ง ที่มีชื่อเสียงที่สุดคือซีรี่ส์ Landsat
- ดาวเทียมทางการทหารโลกอยู่ในวงโคจร แต่ข้อมูลตำแหน่งที่แท้จริงส่วนใหญ่ยังคงเป็นความลับ ดาวเทียมอาจรวมถึงการถ่ายทอดการสื่อสารที่เข้ารหัส การเฝ้าติดตามด้วยนิวเคลียร์ การเฝ้าระวังการเคลื่อนไหวของศัตรู การเตือนล่วงหน้าเกี่ยวกับการยิงขีปนาวุธ การดักฟังการเชื่อมโยงวิทยุภาคพื้นดิน การถ่ายภาพด้วยเรดาร์ และการถ่ายภาพ (โดยใช้กล้องโทรทรรศน์ขนาดใหญ่ที่ถ่ายภาพพื้นที่ที่น่าสนใจทางทหาร)
โลกจากดาวเทียมประดิษฐ์แบบเรียลไทม์
ภาพโลกจากดาวเทียมเทียม ออกอากาศแบบเรียลไทม์โดย NASA จากสถานีอวกาศนานาชาติ ภาพนี้ถ่ายด้วยกล้องความละเอียดสูงสี่ตัวที่แยกได้จากอุณหภูมิเยือกแข็ง ทำให้เรารู้สึกใกล้ชิดกับอวกาศมากขึ้นกว่าเดิม
การทดลอง HDEV บนสถานีอวกาศนานาชาติเปิดใช้งานเมื่อวันที่ 30 เมษายน 2014 ติดตั้งอยู่บนกลไกบรรทุกสินค้าภายนอกของโมดูลโคลัมบัสขององค์การอวกาศยุโรป การทดลองนี้เกี่ยวข้องกับกล้องวิดีโอความละเอียดสูงหลายตัวที่อยู่ในเคส
คำแนะนำ; วางเครื่องเล่นในรูปแบบ HD และแบบเต็มหน้าจอ มีหลายครั้งที่หน้าจอเป็นสีดำ อาจเกิดจากสาเหตุ 2 ประการ คือ สถานีกำลังผ่านเขตวงโคจรที่อยู่ในเวลากลางคืน วงโคจรใช้เวลาประมาณ 90 นาที หรือหน้าจอมืดลงเมื่อกล้องเปลี่ยน
มีดาวเทียมกี่ดวงในวงโคจรโลกในปี 2561?
ตามดัชนีของวัตถุที่ปล่อยสู่อวกาศของสำนักงานกิจการอวกาศแห่งสหประชาชาติ (UNOOSA) ระบุว่า ขณะนี้มีดาวเทียมประมาณ 4,256 ดวงในวงโคจรของโลก เพิ่มขึ้น 4.39% จากปีที่แล้ว

มีการปล่อยดาวเทียม 221 ดวงในปี 2558 ซึ่งมากเป็นอันดับสองในรอบปีเดียว แม้ว่าจะต่ำกว่าจำนวนสูงสุดเป็นประวัติการณ์ที่ 240 ดวงในปี 2557 ก็ตาม จำนวนดาวเทียมที่โคจรรอบโลกเพิ่มขึ้นน้อยกว่าจำนวนที่เปิดตัวเมื่อปีที่แล้ว เนื่องจากดาวเทียมมีอายุขัยที่จำกัด ดาวเทียมสื่อสารขนาดใหญ่มีอายุ 15 ปีขึ้นไป ในขณะที่ดาวเทียมขนาดเล็ก เช่น CubeSats มีอายุการใช้งานเพียง 3-6 เดือนเท่านั้น
มีดาวเทียมโคจรรอบโลกจำนวนกี่ดวงที่ยังใช้งานได้?
สหภาพนักวิทยาศาสตร์ (UCS) กำลังชี้แจงว่าดาวเทียมที่โคจรอยู่ดวงใดที่กำลังทำงานอยู่ และมันก็ไม่ได้มากอย่างที่คุณคิด! ขณะนี้มีดาวเทียมโลกที่ปฏิบัติการอยู่เพียง 1,419 ดวง – เพียงประมาณหนึ่งในสามของจำนวนทั้งหมดในวงโคจร ซึ่งหมายความว่ามีโลหะไร้ประโยชน์มากมายทั่วโลก! นั่นเป็นสาเหตุว่าทำไมบริษัทต่างๆ จึงสนใจที่จะจับและส่งเศษขยะอวกาศกลับคืนมา โดยใช้เทคนิคต่างๆ เช่น ตาข่ายอวกาศ หนังสติ๊ก หรือใบเรือสุริยะ
ดาวเทียมเหล่านี้กำลังทำอะไรอยู่?
ตามข้อมูลของ UCS วัตถุประสงค์หลักของดาวเทียมปฏิบัติการคือ:
- การสื่อสาร - 713 ดาวเทียม
- การสังเกตโลก/วิทยาศาสตร์ - ดาวเทียม 374 ดวง
- การสาธิต/พัฒนาเทคโนโลยีโดยใช้ดาวเทียม 160 ดวง
- ระบบนำทางและ GPS - 105 ดาวเทียม
- วิทยาศาสตร์อวกาศ - ดาวเทียม 67 ดวง
ควรสังเกตว่าดาวเทียมบางดวงมีวัตถุประสงค์หลายประการ
ใครเป็นเจ้าของดาวเทียมของโลก?
เป็นที่น่าสนใจที่จะทราบว่ามีผู้ใช้หลักสี่ประเภทในฐานข้อมูล UCS แม้ว่า 17% ของดาวเทียมจะเป็นของผู้ใช้หลายคนก็ตาม
- ดาวเทียม 94 ดวงที่พลเรือนลงทะเบียน ซึ่งโดยปกติจะเป็นสถาบันการศึกษา แม้ว่าจะมีองค์กรระดับชาติอื่นๆ ก็ตาม 46% ของดาวเทียมเหล่านี้มีวัตถุประสงค์เพื่อพัฒนาเทคโนโลยี เช่น วิทยาศาสตร์โลกและอวกาศ การสังเกตคิดเป็นอีก 43%
- 579 เป็นของผู้ใช้เชิงพาณิชย์: องค์กรการค้าและองค์กรภาครัฐที่ต้องการขายข้อมูลที่พวกเขารวบรวม 84% ของดาวเทียมเหล่านี้มุ่งเน้นไปที่การสื่อสารและบริการระบุตำแหน่งบนพื้นโลก ที่เหลืออีก 12% เป็นดาวเทียมสำรวจโลก
- ดาวเทียม 401 ดวงเป็นของผู้ใช้ของรัฐบาล ซึ่งส่วนใหญ่เป็นองค์กรอวกาศระดับชาติ แต่ยังรวมถึงองค์กรระดับชาติและนานาชาติอื่นๆ ด้วย 40% เป็นดาวเทียมสื่อสารและระบุตำแหน่งทั่วโลก อีก 38% มุ่งเน้นไปที่การสังเกตโลก ส่วนที่เหลือ การพัฒนาวิทยาศาสตร์และเทคโนโลยีอวกาศคิดเป็น 12% และ 10% ตามลำดับ
- ดาวเทียม 345 ดวงเป็นของกองทัพ โดยเน้นอีกครั้งที่การสื่อสาร การสังเกตโลก และระบบระบุตำแหน่งบนพื้นโลก โดย 89% ของดาวเทียมมีจุดประสงค์อย่างใดอย่างหนึ่งในสามประการนี้
ประเทศมีดาวเทียมกี่ดวง?
ตามข้อมูลของ UNOOSA มีประมาณ 65 ประเทศที่ปล่อยดาวเทียม แม้ว่าฐานข้อมูล UCS จะมีเพียง 57 ประเทศที่บันทึกโดยใช้ดาวเทียม และดาวเทียมบางดวงอยู่ในรายชื่อผู้ให้บริการร่วม/ข้ามชาติ ใหญ่ที่สุด:
- สหรัฐอเมริกา มีดาวเทียม 576 ดวง
- จีนมีดาวเทียม 181 ดวง
- รัสเซียมีดาวเทียม 140 ดวง
- สหราชอาณาจักรมีดาวเทียม 41 ดวง และมีส่วนร่วมในดาวเทียมอีก 36 ดวงที่ดำเนินการโดยองค์การอวกาศยุโรป
จำไว้เมื่อคุณมอง!
ครั้งต่อไปที่คุณมองท้องฟ้ายามค่ำคืน จำไว้ว่าระหว่างคุณกับดวงดาวมีโลหะประมาณสองล้านกิโลกรัมล้อมรอบโลก!
นับตั้งแต่การปล่อยดาวเทียมโลกเทียม (AES) ดวงแรกในปี 2500 ชีวิตมนุษย์เปลี่ยนแปลงไปอย่างมาก มนุษยชาติเป็นหนี้ความสำเร็จหลายประการของความก้าวหน้าทางเทคโนโลยี (การสื่อสารผ่านดาวเทียมระหว่างประเทศ การพยากรณ์อากาศที่แม่นยำ อินเทอร์เน็ต) มาจากดาวเทียมที่บินอยู่ในวงโคจรในอวกาศใกล้โลก ปัจจุบันมีดาวเทียมนับหมื่นดวงที่ทำงานแตกต่างไปจากเดิมอย่างสิ้นเชิง ขนาดมีตั้งแต่ใหญ่ (ประมาณ 100 เมตร) ไปจนถึงเล็กมาก (ไม่กี่เซนติเมตร) แต่ละคนมีหน้าที่ของตัวเองและมีวงโคจรของตัวเอง ดาวเทียมบินอยู่ในวงโคจรใด มีวงโคจรแบบไหนและมันเกี่ยวกับอะไร?

ประวัติเล็กน้อย
ผู้คนสังเกตเห็นมานานแล้วว่าวัตถุในจักรวาลขนาดใหญ่ ไม่ว่าจะเป็นดาวหาง ดาวเคราะห์ หรือดวงดาว เคลื่อนที่ข้ามท้องฟ้า โดยรักษาช่วงระยะเวลาหนึ่งไว้ บรรดาผู้ที่อยากรู้อยากเห็นเป็นพิเศษได้บันทึกข้อสังเกตของพวกเขา ซึ่งทำให้คนรุ่นใหม่แต่ละคนมีความรู้เกี่ยวกับการเคลื่อนไหวในอวกาศมากขึ้นเรื่อยๆ
ตัวอย่างเช่น ขณะศึกษาผลงานของนักดาราศาสตร์ชาวเดนมาร์ก ไทโค บราเฮอ โยฮันเนส เคปเลอร์ นักดาราศาสตร์ชาวเยอรมันแห่งศตวรรษที่ 16 ได้ตั้งสมมติฐานว่าวัตถุในจักรวาลทั้งหมดเคลื่อนที่ตามกฎบางประการ โดยเฉพาะอย่างยิ่งเคปเลอร์แนะนำว่าดาวอังคาร (สำหรับดาวเคราะห์ดวงนี้ที่ Brahe สังเกตมาเป็นเวลานาน) จะไม่เคลื่อนที่รอบดวงอาทิตย์เป็นวงกลมเลย ในงานของเขาเรื่อง “New Astronomy Set forh in Researches on the Motion of the Star Mars” เคปเลอร์แสดงให้เห็นว่าดาวอังคารหมุนรอบดวงอาทิตย์เป็นรูปวงรี ต่อมา เคปเลอร์ได้กำหนดข้อสรุปเพิ่มเติมหลายประการ ซึ่งเขารวมเป็นสามคำจำกัดความ ปัจจุบันเรารู้จักคำจำกัดความเหล่านี้ (ปัจจุบันเรียกว่ากฎ) ในชื่อของเขา
เราจะไม่เข้าไปในประวัติศาสตร์โดยละเอียดทั้งหมด ยังดีกว่า เรามาดูกันว่ามนุษยชาติประสบความสำเร็จอะไรบ้าง และได้ข้อสรุปอะไรบ้างโดยใช้กฎของเคปเลอร์ เริ่มต้นด้วยการกำหนดวงโคจร
วงโคจรของดาวเทียมคืออะไร
จริงๆ แล้ว วงโคจรของดาวเทียมคือวิถีการเคลื่อนที่ของมัน การเคลื่อนที่ในวงโคจรเกิดขึ้นโดยความเฉื่อย (โดยที่เครื่องยนต์ดับ) และในขณะเดียวกันดาวเทียม (อาจเป็นดาวเทียมเทียมหรือดาวเคราะห์ก็ได้) ได้รับอิทธิพลจากแรงโน้มถ่วงเท่านั้น (แน่นอนว่าโลกเป็นหลัก) วงโคจรดาวเทียมพวกมันมีรูปร่างเป็นวงรีและเคลื่อนที่ไปตามระนาบจินตนาการที่ผ่านศูนย์กลางของโลก ระนาบนี้และด้วยเหตุนี้วงโคจรจึงไม่สมมาตร แต่ค่อนข้างยาว กล่าวคือ มันไม่คงที่ เปลี่ยนแปลงตลอดเวลา บางครั้งเพิ่มขึ้นและบางครั้งก็ลดลงตามวิถีโคจร ในแง่วิทยาศาสตร์ จุดสูงสุดของวงโคจร (ระยะทางสูงสุดจากโลก) เรียกว่า จุดสุดยอด และจุดต่ำสุด (ระยะทางขั้นต่ำจากโลก) เรียกว่า จุดเพอริจี ตั้งอยู่ตามลำดับในซีกโลกใต้และซีกโลกเหนือ
ตามกฎข้อที่สองของเคปเลอร์ ดาวเคราะห์ (ในกรณีของเราคือดาวเทียม) ที่กำลังเคลื่อนที่ในเครื่องบินจะผ่าน (อธิบาย) พื้นที่ที่เท่ากันในช่วงเวลาที่เท่ากัน จากนี้เราสามารถสรุปได้ว่าดาวเทียมเคลื่อนที่ไม่สม่ำเสมอ ยิ่งดาวเทียมอยู่ใกล้โลก (เพริจี) ยิ่งมีความเร็วเชิงเส้นมากเท่าไร และยิ่งอยู่ห่างจากโลก (เอโพจี) มากเท่าใด ความเร็วก็จะยิ่งต่ำลงเท่านั้น ปรากฏการณ์นี้ทำให้นักวิทยาศาสตร์สามารถสันนิษฐานและคำนวณต่างๆ ได้ วงโคจรของดาวเทียมเหมาะสมที่สุดสำหรับวัตถุประสงค์เฉพาะ
วงโคจรคืออะไร?
ขึ้นอยู่กับความเร็วเริ่มต้นที่กำหนด ดาวเทียมที่ปล่อยสู่อวกาศจะมีวงโคจรที่แน่นอน (หรือวงแรกและวงโคจรอื่น) คุณสมบัติของวงโคจรของดาวเทียมทำให้สามารถเพิ่มประสิทธิภาพอุปกรณ์ส่งและรับเพื่อการปฏิบัติงานที่ได้รับมอบหมายให้เกิดประโยชน์สูงสุด วงโคจรจะแตกต่างกันไปตามความเอียง โดยขนาดของกึ่งแกนเอก (หรือความสูงเหนือพื้นผิวโลก) และโดยความเร็วของการหมุนรอบโลกของดาวเทียม พิจารณาประเภทของวงโคจรดาวเทียมโดยละเอียด
วงโคจรด้วยความโน้มเอียงที่กำหนด
การจำแนกประเภทนี้แสดงให้เห็นว่าวงโคจรมีความลาดเอียงแตกต่างกันอย่างไร ยิ่งมุมเอียงของวงโคจรมากเท่าไร ดาวเทียมก็จะยิ่งมองเห็นได้มากขึ้นที่ละติจูดเหนือ และยิ่งดาวเทียมสูงเท่าใด ขอบเขตการมองเห็นก็จะกว้างขึ้นเท่านั้น มีเส้นศูนย์สูตร (วงโคจรตามเส้นศูนย์สูตรของโลก) ขั้วโลก (วงโคจรตั้งฉากกับเส้นศูนย์สูตร) และวงโคจรซิงโครนัสของดวงอาทิตย์ วงโคจรหลังมักใช้เพื่อวางดาวเทียมสำหรับบันทึกภาพถ่ายและวิดีโอของพื้นผิวโลก
วงโคจรที่มีระดับความสูงต่างกัน (กึ่งแกนเอก)
ดาวเทียมที่ปล่อยนั้นเรียกว่าวงโคจรต่ำหรือวงโคจรกลางตามลำดับ ทั้งนี้ขึ้นอยู่กับความสูงของวงโคจร
ดาวเทียมวงโคจรโลกต่ำบินเหนือพื้นผิวโลกที่ระดับความสูง 160 กิโลเมตรถึง 2,000 กิโลเมตร ชื่อที่พบมากที่สุดในวรรณกรรมทางวิทยาศาสตร์คือ LEO (จากวงโคจรโลกต่ำของอังกฤษ)
ดาวเทียมวงโคจรต่ำดังกล่าวมักใช้เพื่อการสื่อสารทางวิทยุโทรศัพท์ส่วนบุคคล สิ่งนี้อธิบายได้จากการสัมผัสขั้วกราวด์กับตัวทวนสัญญาณดาวเทียมอย่างต่อเนื่องตลอดจนพลังของการส่งและรับสัญญาณ อย่างไรก็ตาม แง่มุมนี้ถูกนำมาใช้ในสาขาโทรคมนาคมเมื่อไม่นานมานี้ ดังนั้น ในประเทศที่มีโครงสร้างพื้นฐานที่พัฒนาแล้ว ส่วนแบ่งการให้บริการของดาวเทียมวงโคจรต่ำจึงมีเพียงประมาณ 35% เท่านั้น ส่วนแบ่งหลักประกอบด้วยดาวเทียมที่บินอยู่ในวงโคจรค้างฟ้า
ดาวเทียมวงโคจรขนาดกลางเรียกว่าดาวเทียมที่บินเหนือพื้นผิวโลกที่ระดับความสูง 2,000 กิโลเมตรถึง 35,786 กิโลเมตร พวกมันถูกเรียกตามลำดับว่า MEO (จากภาษาอังกฤษว่า "Medium Earth Orbit")
ความสูงของวงโคจรเหล่านี้ใช้โดยระบบนำทางทั่วโลก (GPS, GLONASS) นี่ค่อนข้างยุติธรรมเนื่องจากระดับความสูงที่กำหนดของดาวเทียมวงโคจรกลางช่วยให้การแลกเปลี่ยนข้อมูลกับเครื่องรับ (ระบบนำทาง) แม่นยำที่สุด
วงโคจรค้างฟ้า
การจำแนกประเภทนี้แสดงความเร็วของการปฏิวัติของดาวเทียมรอบโลกที่อยู่ในวงโคจรที่แน่นอน ความเร็ววงโคจรของดาวเทียมดังกล่าวคือ 23 ชั่วโมง 56 นาที 4.09 วินาที เป็นเรื่องง่ายที่จะเข้าใจว่าตัวเลขนี้เท่ากับวันทางโลก ด้วยเหตุนี้ ดาวเทียมในวงโคจรดังกล่าวจึงดูเหมือนจะ "ค้าง" บนท้องฟ้าในที่เดียว
 วงโคจรค้างฟ้าอยู่ห่างจากพื้นผิวโลก 35,786 กิโลเมตร วงโคจรผ่านไปในระนาบเส้นศูนย์สูตรของโลก รัศมีของมันคือ 42164 กิโลเมตร ซึ่งมากกว่ารัศมีของโลกของเราประมาณ 6 เท่า (6378 กิโลเมตร) พิกัดท้องฟ้าของดาวเทียมดังกล่าวในวงโคจรค้างฟ้ายังคงไม่เปลี่ยนแปลง ทำให้สามารถใช้กับโทรทัศน์ดาวเทียมได้ สัญญาณที่มาจากดาวเทียมดังกล่าวมีความชัดเจนและไม่สะดุด
วงโคจรค้างฟ้าอยู่ห่างจากพื้นผิวโลก 35,786 กิโลเมตร วงโคจรผ่านไปในระนาบเส้นศูนย์สูตรของโลก รัศมีของมันคือ 42164 กิโลเมตร ซึ่งมากกว่ารัศมีของโลกของเราประมาณ 6 เท่า (6378 กิโลเมตร) พิกัดท้องฟ้าของดาวเทียมดังกล่าวในวงโคจรค้างฟ้ายังคงไม่เปลี่ยนแปลง ทำให้สามารถใช้กับโทรทัศน์ดาวเทียมได้ สัญญาณที่มาจากดาวเทียมดังกล่าวมีความชัดเจนและไม่สะดุด
การรักษาจุดระบุตำแหน่งให้คงที่ (“การแขวน” ในที่เดียว) นั้นไม่สามารถทำได้อย่างสมบูรณ์ เนื่องจากดาวเทียมได้รับอิทธิพลอย่างต่อเนื่องจากดวงจันทร์ ซึ่งเป็นดาวเทียมธรรมชาติที่ใกล้ที่สุดของโลก ดวงจันทร์ทำให้เกิดการรบกวนจากแรงโน้มถ่วงในวงโคจรของดาวเทียม และดึงมันเข้าหาตัวมันเอง ตำแหน่งของดาวเทียมจะถูกปรับโดยใช้เครื่องยนต์ที่ติดตั้งไว้
“คลาร์ก เบลท์”
เป็นครั้งแรกในประวัติศาสตร์ที่วิศวกรชาวอังกฤษ Arthur Clarke คำนวณวงโคจรค้างฟ้า สิ่งนี้เกิดขึ้นในปี พ.ศ. 2488 อันห่างไกลออกไปแล้ว คลาร์กเสนอให้ใช้วงโคจรนี้สำหรับดาวเทียมสื่อสาร ความคิดนี้ทำให้คลาร์กประหลาดใจและในไม่ช้าก็เป็นจริง! ระบบการสื่อสารทั่วโลกเกือบทั้งหมดเป็นหนี้การมีอยู่ของบุคคลนี้ ในความหมายที่กว้างกว่า ทุกคนที่ใช้อินเทอร์เน็ตในปัจจุบันเป็นหนี้ Arthur C. Clarke ที่ประเมินค่าไม่ได้ ในอังกฤษและประเทศอื่นๆ ส่วนใหญ่ โดยเฉพาะในยุโรป วงโคจรค้างฟ้าเรียกว่า "แถบคลาร์ก"
การนำดาวเทียมขึ้นสู่วงโคจร
กระบวนการส่งดาวเทียมและการปล่อยดาวเทียมไปยังระดับความสูง (วงโคจร) ที่กำหนดเป็นชุดของการดำเนินการทางวิทยาศาสตร์และการปฏิบัติโดยอิงจากการคำนวณทางคณิตศาสตร์และกายภาพที่ชัดเจน การส่งดาวเทียมโดยตรงนั้นดำเนินการโดยจรวดหลายขั้นตอนโดยใช้วงโคจรระดับกลาง
มันมีไว้เพื่ออะไร
 การพิจารณาหัวข้อที่ซับซ้อนแต่น่าสนใจ เช่น การโคจรของดาวเทียม คำจำกัดความและการจำแนกวงโคจร และอื่นๆ ทำให้เกิดคำถามมากมายในเชิงตรรกะ สิ่งนี้มีประโยชน์อะไร? ทำไมคุณต้องรู้ทั้งหมดนี้?
การพิจารณาหัวข้อที่ซับซ้อนแต่น่าสนใจ เช่น การโคจรของดาวเทียม คำจำกัดความและการจำแนกวงโคจร และอื่นๆ ทำให้เกิดคำถามมากมายในเชิงตรรกะ สิ่งนี้มีประโยชน์อะไร? ทำไมคุณต้องรู้ทั้งหมดนี้?
ดังที่ได้กล่าวไปแล้วในตอนต้นของบทความ ด้วยการถือกำเนิดของดาวเทียมโลกเทียมในวงโคจรและการสำรวจวงโคจรใกล้โลกของมนุษย์ ทำให้ชีวิตของมนุษยชาติยุคใหม่เปลี่ยนไปมาก ตัวอย่างเช่น ต้นทุนเฉลี่ยของการโทรระหว่างประเทศลดลงอย่างมาก สามารถใช้ทรัพยากรของระบบนำทางด้วยดาวเทียมทั่วโลกได้ พยากรณ์อากาศที่แม่นยำ, การคำนวณการเปลี่ยนแปลงสภาพภูมิอากาศในบางภูมิภาคของโลก, พยากรณ์การเปลี่ยนแปลงทางภูมิศาสตร์และภูมิอากาศในระดับดาวเคราะห์, การสำรวจก้นทะเลและแหล่งสะสมแร่, การเข้าถึงเวิลด์ไวด์เว็บทุกที่บนโลก, การสำรวจอวกาศในท้ายที่สุด - ทั้งหมดนี้เกิดขึ้นได้โดยการโคจรรอบดาวเทียม
น่าเสียดายที่ทุกวันนี้วงโคจรใกล้โลกมีความอิ่มตัวมากเกินไปด้วย "เศษอวกาศ" ต่างๆ มีการประเมินกันว่าวัตถุบินมากกว่า 1,100 ชิ้นที่มีเส้นผ่านศูนย์กลางมากกว่าครึ่งเมตรนั้นตั้งอยู่ใกล้กับวงโคจรค้างฟ้าของโลก ซึ่งโดยทั่วไปจะเป็นที่เก็บอุปกรณ์สื่อสาร อย่างไรก็ตาม มีวัตถุเหล่านี้เพียง 300 ชิ้นเท่านั้นที่เป็นดาวเทียมปฏิบัติการ ในบรรดาวัตถุอันตรายที่ถูกทิ้งโดยไม่จำเป็นในอวกาศที่ระดับความสูงต่างกัน ได้แก่ เครื่องปฏิกรณ์นิวเคลียร์ 32 เครื่องที่เลิกใช้งานมานาน ทั้งหมดนี้พูดถึงความอกตัญญูของ "ผู้ใช้" แต่ละคนของวงโคจรที่มีต่อผู้ที่ครั้งหนึ่งเคยให้ความรู้อันล้ำค่าแก่เราเกี่ยวกับกฎการเคลื่อนที่ของวัตถุในจักรวาล
วิถีโคจรของยานอวกาศประดิษฐ์นั้นแตกต่างจากวงโคจรของเทห์ฟากฟ้าตามธรรมชาติ: ความจริงก็คือในกรณีแรกมีสิ่งที่เรียกว่า "ส่วนที่ทำงานอยู่" เหล่านี้คือพื้นที่ วงโคจรของดาวเทียมซึ่งพวกมันเคลื่อนที่โดยการเปิดเครื่องยนต์ไอพ่น ดังนั้นการคำนวณวิถีของยานอวกาศจึงเป็นงานที่ซับซ้อนและมีความรับผิดชอบซึ่งผู้เชี่ยวชาญในสาขาดาราศาสตร์พลศาสตร์เป็นผู้ดำเนินการ
ระบบดาวเทียมแต่ละระบบมีสถานะที่แน่นอน ขึ้นอยู่กับวัตถุประสงค์ของดาวเทียม ตำแหน่ง การครอบคลุมพื้นที่ให้บริการ และกรรมสิทธิ์ของทั้งตัวยานอวกาศและสถานีภาคพื้นดินที่รับสัญญาณ ระบบดาวเทียมได้แก่: ขึ้นอยู่กับสถานะ
- นานาชาติ (ระดับภูมิภาคหรือระดับโลก);
- ระดับชาติ;
- แผนก.
นอกจากนี้ วงโคจรทั้งหมดยังถูกแบ่งย่อยอีกด้วยบน geostationary และ non-geostationary (ในทางกลับกันแบ่งออกเป็น LEO - วงโคจรต่ำ, MEO - ระดับความสูงปานกลางและ HEO - วงรี) มาดูคลาสเหล่านี้กันดีกว่า
ภาวะหยุดนิ่ง วงโคจรของดาวเทียม
วงโคจรประเภทนี้มักใช้ในการวางยานอวกาศบ่อยที่สุดเนื่องจากมีข้อได้เปรียบที่สำคัญ: สามารถสื่อสารได้อย่างต่อเนื่องตลอด 24 ชั่วโมงและในทางปฏิบัติไม่มีการเปลี่ยนความถี่ ดาวเทียมค้างอยู่ที่ระดับความสูงประมาณ 36,000 กม. เหนือพื้นผิวโลกและเคลื่อนที่ด้วยความเร็วของการหมุนราวกับว่า "ลอย" เหนือจุดหนึ่งของเส้นศูนย์สูตร "จุดย่อยดาวเทียม" อย่างไรก็ตาม ในความเป็นจริง ตำแหน่งของดาวเทียมดังกล่าวไม่ได้อยู่กับที่ โดยจะเกิดการ "เคลื่อนตัว" บ้างเนื่องจากปัจจัยหลายประการ ส่งผลให้วงโคจรมีการเปลี่ยนแปลงเล็กน้อยเมื่อเวลาผ่านไป
ตามที่ระบุไว้แล้ว ดาวเทียมค้างฟ้าไม่จำเป็นต้องมีการหยุดชะงักในการทำงาน เนื่องจากยานอวกาศและสถานีภาคพื้นดินไม่มีการเคลื่อนที่ร่วมกัน ระบบที่ประกอบด้วยดาวเทียมประเภทนี้สามดวงสามารถครอบคลุมพื้นผิวโลกได้เกือบทั้งหมด
ในขณะเดียวกันระบบดังกล่าวก็ไม่มีข้อเสียบางประการซึ่งระบบหลักคือความล่าช้าของสัญญาณ ดังนั้นดาวเทียมในวงโคจรค้างฟ้าจึงมักถูกใช้สำหรับการออกอากาศทางวิทยุและโทรทัศน์ ซึ่งความล่าช้าทั้งสองทิศทางที่ 250 มิลลิวินาที จะไม่ส่งผลกระทบต่อคุณภาพของสัญญาณ ความล่าช้าในระบบสื่อสารทางวิทยุโทรศัพท์นั้นเห็นได้ชัดเจนกว่ามาก (เมื่อคำนึงถึงการประมวลผลสัญญาณในเครือข่ายภาคพื้นดินแล้ว เวลาทั้งหมดจะอยู่ที่ประมาณ 600 มิลลิวินาที) นอกจากนี้ พื้นที่ครอบคลุมของดาวเทียมดังกล่าวไม่รวมถึงพื้นที่ละติจูดสูง (สูงกว่า 76.50° N และ S) กล่าวคือ ไม่รับประกันความครอบคลุมทั่วโลกอย่างแท้จริง
เนื่องจากการพัฒนาอย่างรวดเร็วของการสื่อสารผ่านดาวเทียม ในช่วงทศวรรษที่ผ่านมา วงโคจรค้างฟ้าจึงกลายเป็น "แออัด" และเกิดปัญหากับการวางตำแหน่งอุปกรณ์ใหม่ ความจริงก็คือตามมาตรฐานสากลสามารถวางดาวเทียมได้ไม่เกิน 360 ดวงในวงโคจรใกล้เส้นศูนย์สูตรมิฉะนั้นจะเกิดการรบกวนซึ่งกันและกัน
ความสูงปานกลาง วงโคจรของดาวเทียม
ระบบดาวเทียมประเภทนี้เริ่มได้รับการพัฒนาโดยบริษัทที่เริ่มมีส่วนร่วมในการผลิตยานอวกาศค้างฟ้า วงโคจรระดับความสูงปานกลางให้ประสิทธิภาพการสื่อสารที่ดีขึ้นสำหรับสมาชิกมือถือ เนื่องจากผู้ใช้การสื่อสารเคลื่อนที่แต่ละรายสามารถเข้าถึงดาวเทียมหลายดวงพร้อมกันได้ ความล่าช้าทั้งหมด - ไม่เกิน 130 ms
ตำแหน่งของดาวเทียมที่ไม่มีการเคลื่อนที่ในอวกาศนั้นถูกจำกัดโดยสิ่งที่เรียกว่าแถบรังสีแวนอัลเลน ซึ่งเป็นแถบอวกาศของอนุภาคที่มีประจุซึ่งถูก "จับ" โดยสนามแม่เหล็กของโลก แถบรังสีสูงเสถียรเส้นแรกตั้งอยู่ที่ระดับความสูงประมาณ 1,500 กม. จากพื้นผิวโลกโดยมีขอบเขตหลายพันกิโลเมตร แถบที่สองซึ่งมีความเข้มสูงเท่ากัน (10,000 พัลส์/วินาที) อยู่ห่างจากโลกภายใน 13,000–19,000 กม.

"เส้นทาง" ชนิดหนึ่งสำหรับดาวเทียมระดับความสูงปานกลางตั้งอยู่ระหว่างแถบรังสีที่หนึ่งและที่สองนั่นคือที่ระดับความสูง 5,000–15,000 กม. อุปกรณ์เหล่านี้อ่อนแอกว่าอุปกรณ์ค้างฟ้า ดังนั้นเพื่อให้ครอบคลุมพื้นผิวโลกอย่างสมบูรณ์จึงจำเป็นต้องมีกลุ่มวงโคจรของดาวเทียม 8-12 ดวง (เช่น Spaceway NGSO, ICO, Rostelesat) ดาวเทียมแต่ละดวงจะอยู่ในโซนการมองเห็นวิทยุของสถานีภาคพื้นดินในช่วงเวลาสั้นๆ ประมาณ 1.5-2 ชั่วโมง
วงกลมต่ำ วงโคจรของดาวเทียม
ดาวเทียมในวงโคจรต่ำ (700-1500 กม.) มีข้อได้เปรียบเหนือยานอวกาศอื่นในแง่ของคุณลักษณะด้านพลังงาน แต่จะสูญเสียในช่วงระยะเวลาของการสื่อสารตลอดจนอายุการใช้งานโดยรวม คาบการโคจรของดาวเทียมโดยเฉลี่ยอยู่ที่ 100 นาที โดยมีเวลาประมาณ 30% ที่เหลืออยู่ในด้านเงาของดาวเคราะห์ แบตเตอรี่ออนบอร์ดสามารถรองรับรอบการชาร์จ/คายประจุได้ประมาณ 5,000 รอบต่อปี และด้วยเหตุนี้ อายุการใช้งานของแบตเตอรี่จึงไม่เกิน 5-8 ปี

การเลือกช่วงระดับความสูงนี้สำหรับระบบดาวเทียมวงโคจรต่ำไม่ใช่เรื่องบังเอิญ ที่ระดับความสูงน้อยกว่า 700 กม. ความหนาแน่นของบรรยากาศค่อนข้างสูงซึ่งทำให้วงโคจร "เสื่อมโทรม" ซึ่งเป็นการเบี่ยงเบนอย่างค่อยเป็นค่อยไปจากเส้นทางซึ่งต้องใช้เชื้อเพลิงเพิ่มขึ้นเพื่อรักษาไว้ ที่ระดับความสูง 1,500 กม. สายพาน Van Allen เส้นแรกเริ่มต้นขึ้นในเขตรังสีซึ่งการทำงานของอุปกรณ์ออนบอร์ดเป็นไปไม่ได้ในทางปฏิบัติ
อย่างไรก็ตาม เนื่องจากวงโคจรอยู่ในระดับความสูงต่ำ จึงจำเป็นต้องมีกลุ่มดาวในวงโคจรที่มียานอวกาศอย่างน้อย 48 ลำจึงจะครอบคลุมพื้นที่ทั้งหมดของโลก ระยะเวลาการหมุนรอบตัวเองในวงโคจรเหล่านี้คือ 90 นาที - 2 ชั่วโมง ในขณะที่เวลาสูงสุดที่ดาวเทียมคงอยู่ในโซนการมองเห็นวิทยุคือเพียง 10-15 นาที
วงโคจรรูปไข่
เครื่องเดินวงรี วงโคจรดาวเทียมโลกเป็นแบบซิงโครนัส กล่าวคือ เมื่อเข้าสู่วงโคจร พวกมันจะหมุนด้วยความเร็วของดาวเคราะห์ และคาบการโคจรจะเป็นพหุคูณของวัน ปัจจุบันมีการใช้วงโคจรหลายประเภท: Archi-medes, Borealis, "Tundra", "Molniya"

ความเร็วของดาวเทียมรูปวงรีที่จุดสุดยอด (เมื่อไปถึงจุดสูงสุดของ “วงรี”) จะต่ำกว่าที่บริเวณรอบนอก ดังนั้นในช่วงเวลานี้ อุปกรณ์สามารถอยู่ในโซนการมองเห็นวิทยุของภูมิภาคหนึ่งได้นานกว่าดาวเทียมที่มีวงโคจรเป็นวงกลม . ตัวอย่างเช่น เซสชันการสื่อสารกับ Molniya ใช้เวลา 8-10 ชั่วโมง และระบบดาวเทียม 3 ดวงสามารถรักษาการสื่อสารทั่วโลกได้ตลอดเวลา
เช่นเดียวกับที่นั่งในโรงละครที่ให้มุมมองที่แตกต่างกันเกี่ยวกับการแสดง วงโคจรดาวเทียมที่แตกต่างกันก็ให้มุมมอง ซึ่งแต่ละจุดมีจุดประสงค์ที่แตกต่างกัน บางส่วนดูเหมือนจะลอยอยู่เหนือจุดหนึ่งบนพื้นผิว ทำให้มองเห็นด้านใดด้านหนึ่งของโลกได้อย่างต่อเนื่อง ในขณะที่บางชิ้นก็โคจรรอบโลกของเราและผ่านสถานที่หลายแห่งในหนึ่งวัน
ประเภทของวงโคจร
ดาวเทียมบินที่ระดับความสูงเท่าใด วงโคจรใกล้โลกมี 3 ประเภท คือ สูง ปานกลาง และต่ำ ในระดับสูงสุดซึ่งอยู่ห่างจากพื้นผิวมากที่สุดตามกฎแล้วจะมีสภาพอากาศจำนวนมากและดาวเทียมสื่อสารบางส่วนอยู่ ดาวเทียมที่หมุนในวงโคจรโลกปานกลางประกอบด้วยการนำทางและดาวเทียมพิเศษที่ออกแบบมาเพื่อตรวจสอบภูมิภาคเฉพาะ ยานอวกาศทางวิทยาศาสตร์ส่วนใหญ่ รวมถึงกองยานอวกาศ Earth Observing System ของ NASA อยู่ในวงโคจรต่ำ
ความเร็วของการเคลื่อนที่ขึ้นอยู่กับระดับความสูงที่ดาวเทียมบิน เมื่อคุณเข้าใกล้โลก แรงโน้มถ่วงจะแข็งแกร่งขึ้นและการเคลื่อนที่จะเร็วขึ้น ตัวอย่างเช่น ดาวเทียม Aqua ของ NASA ใช้เวลาประมาณ 99 นาทีในการโคจรรอบโลกของเราที่ระดับความสูงประมาณ 705 กม. ในขณะที่อุปกรณ์อุตุนิยมวิทยาซึ่งอยู่ห่างจากพื้นผิว 35,786 กม. ใช้เวลา 23 ชั่วโมง 56 นาทีและ 4 วินาที ที่ระยะทาง 384,403 กิโลเมตรจากศูนย์กลางโลก ดวงจันทร์โคจรรอบหนึ่งรอบใน 28 วัน
ความขัดแย้งทางอากาศพลศาสตร์
การเปลี่ยนความสูงของดาวเทียมยังเปลี่ยนความเร็ววงโคจรด้วย มีความขัดแย้งอยู่ที่นี่ หากผู้ให้บริการดาวเทียมต้องการเพิ่มความเร็ว เขาไม่สามารถเพียงสตาร์ทเครื่องยนต์เพื่อเร่งความเร็วได้ สิ่งนี้จะเพิ่มวงโคจร (และระดับความสูง) ส่งผลให้ความเร็วลดลง แต่ควรยิงเครื่องยนต์ไปในทิศทางตรงกันข้ามกับการเคลื่อนที่ของดาวเทียม ซึ่งเป็นการกระทำที่จะทำให้ยานพาหนะที่กำลังเคลื่อนที่บนโลกช้าลง การกระทำนี้จะเคลื่อนให้ต่ำลง เพื่อเพิ่มความเร็ว
ลักษณะวงโคจร
นอกจากระดับความสูงแล้ว เส้นทางของดาวเทียมยังมีลักษณะความเยื้องศูนย์กลางและความเอียงอีกด้วย ประการแรกเกี่ยวข้องกับรูปร่างของวงโคจร ดาวเทียมที่มีความเยื้องศูนย์กลางต่ำจะเคลื่อนที่ไปตามวิถีโคจรใกล้กับวงกลม วงโคจรประหลาดมีรูปร่างเป็นวงรี ระยะทางจากยานอวกาศถึงโลกขึ้นอยู่กับตำแหน่งของยานอวกาศ
ความเอียงคือมุมของวงโคจรที่สัมพันธ์กับเส้นศูนย์สูตร ดาวเทียมที่โคจรรอบเหนือเส้นศูนย์สูตรโดยตรงมีความโน้มเอียงเป็นศูนย์ หากยานอวกาศเคลื่อนผ่านขั้วโลกเหนือและขั้วโลกใต้ (ตามภูมิศาสตร์ ไม่ใช่สนามแม่เหล็ก) ความเอียงของยานอวกาศจะเป็น 90°
เมื่อรวมกันแล้ว ได้แก่ ความสูง ความเยื้องศูนย์ และความเอียง เป็นตัวกำหนดการเคลื่อนที่ของดาวเทียมและลักษณะที่โลกจะมองจากมุมมองของดาวเทียม

สูงใกล้โลก
เมื่อดาวเทียมไปถึงรัศมี 42,164 กม. จากใจกลางโลก (ประมาณ 36,000 กม. จากพื้นผิว) ดาวเทียมจะเข้าสู่โซนที่วงโคจรตรงกับการหมุนของโลกของเรา เนื่องจากยานกำลังเคลื่อนที่ด้วยความเร็วเท่ากับโลก กล่าวคือ ระยะเวลาการโคจรของมันคือ 24 ชั่วโมง ดูเหมือนว่ายานจะยังคงอยู่กับที่ในลองจิจูดเดียว แม้ว่ามันอาจจะลอยจากเหนือลงใต้ก็ตาม วงโคจรสูงพิเศษนี้เรียกว่าจีโอซิงโครนัส
ดาวเทียมเคลื่อนที่ในวงโคจรเป็นวงกลมเหนือเส้นศูนย์สูตรโดยตรง (ความเยื้องศูนย์กลางและความเอียงเป็นศูนย์) และยังคงอยู่นิ่งเมื่อเทียบกับโลก มันอยู่เหนือจุดเดียวกันบนพื้นผิวเสมอ
วงโคจรมอลนิยา (ความเอียง 63.4°) ใช้สำหรับการสังเกตที่ละติจูดสูง ดาวเทียมค้างฟ้าจะผูกติดกับเส้นศูนย์สูตร จึงไม่เหมาะสำหรับพื้นที่ห่างไกลทางเหนือหรือทางใต้ วงโคจรนี้ค่อนข้างประหลาด: ยานอวกาศเคลื่อนที่ในวงรียาวโดยที่โลกอยู่ใกล้กับขอบด้านหนึ่ง เนื่องจากดาวเทียมถูกเร่งด้วยแรงโน้มถ่วง มันจึงเคลื่อนที่เร็วมากเมื่ออยู่ใกล้โลกของเรา เมื่อมันเคลื่อนที่ออกไป ความเร็วจะช้าลง ดังนั้นมันจึงใช้เวลาอยู่บนจุดสูงสุดของวงโคจรตรงขอบที่ไกลจากโลกมากที่สุด ซึ่งเป็นระยะทางถึง 40,000 กม. คาบการโคจรคือ 12 ชั่วโมง แต่ดาวเทียมใช้เวลาประมาณสองในสามของเวลานี้ในซีกโลกหนึ่ง เช่นเดียวกับวงโคจรกึ่งซิงโครนัส ดาวเทียมจะเคลื่อนไปตามเส้นทางเดียวกันทุกๆ 24 ชั่วโมง ใช้สำหรับการสื่อสารในทิศเหนือหรือทิศใต้ไกลออกไป
ใกล้โลกต่ำ
ดาวเทียมวิทยาศาสตร์ส่วนใหญ่ ดาวเทียมอุตุนิยมวิทยาจำนวนมาก และสถานีอวกาศอยู่ในวงโคจรโลกต่ำเกือบเป็นวงกลม ความเอียงของพวกเขาขึ้นอยู่กับสิ่งที่พวกเขากำลังติดตาม TRMM เปิดตัวเพื่อติดตามปริมาณน้ำฝนในเขตร้อน ดังนั้นจึงมีความโน้มเอียงค่อนข้างต่ำ (35°) โดยยังคงอยู่ใกล้กับเส้นศูนย์สูตร
ดาวเทียมระบบสังเกตการณ์ของ NASA หลายดวงมีวงโคจรใกล้ขั้วและมีความโน้มเอียงสูง ยานอวกาศเคลื่อนที่รอบโลกจากขั้วหนึ่งไปอีกขั้วหนึ่งด้วยระยะเวลา 99 นาที ครึ่งหนึ่งของเวลาที่มันเคลื่อนผ่านด้านกลางวันของโลก และที่ขั้วโลกก็หันไปทางด้านกลางคืน
เมื่อดาวเทียมเคลื่อนที่ โลกจะหมุนอยู่ข้างใต้ เมื่อยานพาหนะเคลื่อนที่ไปยังบริเวณที่มีแสงสว่าง ยานพาหนะจะอยู่เหนือพื้นที่ที่อยู่ติดกับโซนวงโคจรสุดท้าย ในระยะเวลา 24 ชั่วโมง ดาวเทียมขั้วโลกจะปกคลุมพื้นที่ส่วนใหญ่ของโลกสองครั้ง ครั้งแรกในเวลากลางวันและอีกครั้งในเวลากลางคืน

วงโคจรแบบซิงโครนัสของดวงอาทิตย์
เช่นเดียวกับที่ดาวเทียม geosynchronous จะต้องอยู่เหนือเส้นศูนย์สูตร ซึ่งช่วยให้พวกมันอยู่เหนือจุดหนึ่ง ดาวเทียมที่โคจรรอบขั้วโลกก็มีความสามารถที่จะคงอยู่ในเวลาเดียวกันได้ วงโคจรของพวกมันเป็นแบบซิงโครนัสดวงอาทิตย์ - เมื่อยานอวกาศข้ามเส้นศูนย์สูตร เวลาสุริยะในท้องถิ่นจะเท่าเดิมเสมอ ตัวอย่างเช่น ดาวเทียม Terra จะข้ามเหนือบราซิลเสมอเวลา 10.30 น. การข้ามครั้งต่อไป 99 นาทีต่อมาเหนือเอกวาดอร์หรือโคลอมเบียก็เกิดขึ้นในเวลา 10:30 น. ตามเวลาท้องถิ่น
วงโคจรแบบซิงโครไนซ์ดวงอาทิตย์ถือเป็นสิ่งสำคัญสำหรับวิทยาศาสตร์ เนื่องจากทำให้แสงอาทิตย์คงอยู่บนพื้นผิวโลกได้ แม้ว่าจะแตกต่างกันไปขึ้นอยู่กับฤดูกาลก็ตาม ความสม่ำเสมอนี้หมายความว่านักวิทยาศาสตร์สามารถเปรียบเทียบภาพดาวเคราะห์ของเราจากฤดูกาลเดียวกันในช่วงหลายปีที่ผ่านมาโดยไม่ต้องกังวลเกี่ยวกับการกระโดดของแสงมากเกินไป ซึ่งอาจทำให้เกิดภาพลวงตาของการเปลี่ยนแปลงได้ หากไม่มีวงโคจรแบบซิงโครไนซ์ดวงอาทิตย์ การติดตามพวกมันเมื่อเวลาผ่านไปและรวบรวมข้อมูลที่จำเป็นเพื่อศึกษาการเปลี่ยนแปลงสภาพภูมิอากาศคงเป็นเรื่องยาก
เส้นทางของดาวเทียมที่นี่มีจำกัดมาก หากอยู่ที่ระดับความสูง 100 กม. วงโคจรควรมีความเอียง 96° การเบี่ยงเบนใด ๆ จะไม่สามารถยอมรับได้ เนื่องจากความต้านทานของชั้นบรรยากาศและแรงโน้มถ่วงของดวงอาทิตย์และดวงจันทร์เปลี่ยนวงโคจรของยานอวกาศ จึงต้องปรับอย่างสม่ำเสมอ
การฉีดเข้าสู่วงโคจร: การเปิดตัว
การปล่อยดาวเทียมต้องใช้พลังงานจำนวนนั้นขึ้นอยู่กับตำแหน่งของจุดปล่อยความสูงและความโน้มเอียงของวิถีการเคลื่อนที่ในอนาคต การจะโคจรไปในวงโคจรระยะไกลต้องใช้พลังงานมากขึ้น ดาวเทียมที่มีความโน้มเอียงอย่างมาก (เช่น ดาวเทียมที่มีขั้ว) จะใช้พลังงานมากกว่าดาวเทียมที่โคจรรอบเส้นศูนย์สูตร การแทรกเข้าไปในวงโคจรที่มีความลาดเอียงต่ำได้รับความช่วยเหลือจากการหมุนของโลก เคลื่อนที่เป็นมุม 51.6397° นี่เป็นสิ่งจำเป็นเพื่อให้กระสวยอวกาศและจรวดของรัสเซียเข้าถึงได้ง่ายขึ้น ความสูงของ ISS คือ 337-430 กม. ในทางกลับกัน ดาวเทียมขั้วโลกไม่ได้รับความช่วยเหลือใดๆ จากโมเมนตัมของโลก ดังนั้นดาวเทียมเหล่านี้จึงต้องการพลังงานมากขึ้นเพื่อที่จะขึ้นไปในระยะทางเท่ากัน

การปรับ
เมื่อดาวเทียมถูกปล่อยออกไป จะต้องพยายามรักษาให้อยู่ในวงโคจรที่แน่นอน เนื่องจากโลกไม่ใช่ทรงกลมที่สมบูรณ์แบบ แรงโน้มถ่วงของมันจึงแข็งแกร่งขึ้นในบางสถานที่ ความผิดปกตินี้ ประกอบกับแรงดึงโน้มถ่วงของดวงอาทิตย์ ดวงจันทร์ และดาวพฤหัสบดี (ดาวเคราะห์ที่มีขนาดใหญ่ที่สุดในระบบสุริยะ) ทำให้ความโน้มเอียงของวงโคจรเปลี่ยนไป ตลอดอายุการใช้งาน ดาวเทียม GOES ได้รับการปรับสามหรือสี่ครั้ง ยานพาหนะในวงโคจรต่ำของ NASA จะต้องปรับความเอียงทุกปี
นอกจากนี้ดาวเทียมใกล้โลกยังได้รับผลกระทบจากชั้นบรรยากาศอีกด้วย ชั้นบนสุดแม้ว่าจะค่อนข้างทำให้บริสุทธิ์ แต่ก็มีแรงต้านทานที่แข็งแกร่งพอที่จะดึงพวกมันเข้ามาใกล้โลกมากขึ้น การกระทำของแรงโน้มถ่วงนำไปสู่การเร่งความเร็วของดาวเทียม เมื่อเวลาผ่านไป พวกมันจะลุกไหม้และหมุนวนต่ำลงเรื่อยๆ สู่ชั้นบรรยากาศ หรือตกลงสู่พื้นโลก
การลากจูงบรรยากาศจะรุนแรงขึ้นเมื่อดวงอาทิตย์ยังทำงานอยู่ เช่นเดียวกับที่อากาศในบอลลูนขยายตัวและเพิ่มขึ้นเมื่อถูกความร้อน บรรยากาศก็จะเพิ่มขึ้นและขยายตัวเมื่อดวงอาทิตย์ให้พลังงานเพิ่มเติมเช่นกัน ชั้นบรรยากาศบาง ๆ เพิ่มขึ้น และชั้นที่หนาแน่นขึ้นก็เข้ามาแทนที่ ดังนั้น ดาวเทียมที่โคจรรอบโลกจะต้องเปลี่ยนตำแหน่งประมาณปีละสี่ครั้งเพื่อชดเชยแรงต้านของชั้นบรรยากาศ เมื่อแสงอาทิตย์อยู่ที่ระดับสูงสุด ต้องปรับตำแหน่งของอุปกรณ์ทุกๆ 2-3 สัปดาห์
เศษอวกาศ
เหตุผลที่สามที่บังคับให้เปลี่ยนวงโคจรคือเศษอวกาศ ดาวเทียมสื่อสารดวงหนึ่งของอิริเดียมชนกับยานอวกาศของรัสเซียที่ไม่ทำงาน พวกเขาชนกันทำให้เกิดเมฆเศษซากที่ประกอบด้วยชิ้นส่วนมากกว่า 2,500 ชิ้น แต่ละองค์ประกอบถูกเพิ่มลงในฐานข้อมูล ซึ่งปัจจุบันมีวัตถุที่มนุษย์สร้างขึ้นมากกว่า 18,000 รายการ
NASA ติดตามทุกสิ่งที่อาจอยู่ในเส้นทางของดาวเทียมอย่างระมัดระวัง เนื่องจากวงโคจรต้องเปลี่ยนแปลงหลายครั้งเนื่องจากเศษซากอวกาศ
วิศวกรจะตรวจสอบตำแหน่งของเศษอวกาศและดาวเทียมที่อาจรบกวนการเคลื่อนที่และวางแผนการหลบหลีกอย่างระมัดระวังตามความจำเป็น ทีมเดียวกันวางแผนและดำเนินการซ้อมรบเพื่อปรับความเอียงและความสูงของดาวเทียม
วงโคจรค้างฟ้าคืออะไร? นี่คือสนามทรงกลมซึ่งตั้งอยู่เหนือเส้นศูนย์สูตรของโลก โดยมีดาวเทียมเทียมหมุนด้วยความเร็วเชิงมุมของการหมุนของดาวเคราะห์รอบแกนของมัน มันไม่เปลี่ยนทิศทางในระบบพิกัดแนวนอน แต่แขวนนิ่งอยู่บนท้องฟ้า วงโคจรโลกค้างฟ้า (GEO) เป็นสนาม geosynchronous ประเภทหนึ่ง และใช้เพื่อวางการสื่อสาร การแพร่ภาพกระจายเสียงโทรทัศน์ และดาวเทียมอื่นๆ
แนวความคิดในการใช้อุปกรณ์ประดิษฐ์
แนวคิดเรื่องวงโคจรค้างฟ้านั้นริเริ่มโดยนักประดิษฐ์ชาวรัสเซีย K. E. Tsiolkovsky ในงานของเขา เขาเสนอการสร้างพื้นที่ว่างด้วยความช่วยเหลือของสถานีโคจร นักวิทยาศาสตร์ชาวต่างประเทศยังบรรยายถึงงานของสนามจักรวาลด้วย เช่น G. Oberth ผู้ที่พัฒนาแนวคิดการใช้วงโคจรเพื่อการสื่อสารคือ อาเธอร์ ซี. คลาร์ก ในปี พ.ศ. 2488 เขาได้ตีพิมพ์บทความในนิตยสาร Wireless World ซึ่งเขาบรรยายถึงข้อดีของสนาม geostationary สำหรับงานของเขาในสาขานี้เพื่อเป็นเกียรติแก่นักวิทยาศาสตร์ วงโคจรได้รับชื่อที่สอง - "แถบคลาร์ก" นักทฤษฎีหลายคนมีความคิดเกี่ยวกับปัญหาในการใช้การสื่อสารคุณภาพสูง ดังนั้น Herman Potochnik ในปี 1928 ได้แสดงแนวคิดว่าดาวเทียมค้างฟ้าจะถูกนำมาใช้ได้อย่างไร
ลักษณะของ “เข็มขัดคลาร์ก”
เพื่อให้วงโคจรถูกเรียกว่า geostationary จะต้องเป็นไปตามพารามิเตอร์จำนวนหนึ่ง:
1. จีโอซิงโครนี ลักษณะนี้รวมถึงสนามที่มีคาบที่สอดคล้องกับคาบการหมุนของโลก ดาวเทียม geosynchronous โคจรรอบโลกเสร็จสิ้นภายในหนึ่งวันดาวฤกษ์ ซึ่งก็คือ 23 ชั่วโมง 56 นาที และ 4 วินาที โลกต้องใช้เวลาเท่ากันในการปฏิวัติหนึ่งครั้งในพื้นที่คงที่
2. เพื่อรักษาดาวเทียมไว้ที่จุดใดจุดหนึ่ง วงโคจรค้างฟ้าจะต้องเป็นวงกลมโดยมีความเอียงเป็นศูนย์ สนามวงรีจะส่งผลให้เกิดการกระจัดไม่ว่าจะไปทางทิศตะวันออกหรือทิศตะวันตก เนื่องจากยานมีการเคลื่อนที่แตกต่างออกไปที่จุดใดจุดหนึ่งในวงโคจรของมัน
3. “จุดโฮเวอร์” ของกลไกอวกาศต้องอยู่ที่เส้นศูนย์สูตร
4. ตำแหน่งของดาวเทียมในวงโคจรค้างฟ้าควรเป็นเช่นนั้นเพื่อให้ความถี่จำนวนเล็กน้อยที่มีไว้สำหรับการสื่อสารไม่ทำให้เกิดการทับซ้อนกันของความถี่ของอุปกรณ์ต่าง ๆ ระหว่างการรับและการส่งสัญญาณตลอดจนเพื่อหลีกเลี่ยงการชนกัน
5. ปริมาณเชื้อเพลิงที่เพียงพอเพื่อรักษาตำแหน่งกลไกของช่องว่างให้คงที่
วงโคจรค้างฟ้าของดาวเทียมมีลักษณะเฉพาะตรงที่เมื่อรวมพารามิเตอร์เข้าด้วยกันเท่านั้น อุปกรณ์จึงจะนิ่งได้ คุณสมบัติอีกประการหนึ่งคือความสามารถในการมองเห็นโลกในมุมสิบเจ็ดองศาจากดาวเทียมที่อยู่ในสนามอวกาศ อุปกรณ์แต่ละชิ้นจับได้ประมาณหนึ่งในสามของพื้นผิววงโคจร ดังนั้นกลไกทั้งสามจึงสามารถครอบคลุมเกือบทั้งดาวเคราะห์ได้
ดาวเทียมประดิษฐ์


ดาวเทียมได้ถูกปล่อยออกไปโดยหลายประเทศและบริษัทต่างๆ อุปกรณ์ประดิษฐ์ชิ้นแรกของโลกถูกสร้างขึ้นในสหภาพโซเวียตและบินขึ้นสู่อวกาศเมื่อวันที่ 4 ตุลาคม พ.ศ. 2500 มีชื่อว่าสปุตนิก 1 ในปี พ.ศ. 2501 สหรัฐอเมริกาได้เปิดตัวยานอวกาศลำที่สองชื่อ Explorer 1 ดาวเทียมดวงแรกที่ NASA เปิดตัวในปี 2507 มีชื่อว่า Syncom-3 อุปกรณ์ประดิษฐ์ส่วนใหญ่ไม่สามารถคืนได้ แต่มีบางส่วนหรือทั้งหมดที่ถูกส่งคืน ใช้ในการวิจัยทางวิทยาศาสตร์และแก้ปัญหาต่างๆ มีทั้งดาวเทียมทางการทหาร ดาวเทียมวิจัย นำทาง และอื่นๆ อุปกรณ์ที่สร้างขึ้นโดยพนักงานมหาวิทยาลัยหรือนักวิทยุสมัครเล่นก็เปิดตัวเช่นกัน
“จุดยืน”
ดาวเทียมค้างอยู่ที่ระดับความสูง 35,786 กิโลเมตรเหนือระดับน้ำทะเล ระดับความสูงนี้ให้คาบการโคจรที่สอดคล้องกับคาบการหมุนของโลกสัมพันธ์กับดวงดาว ยานพาหนะเทียมนั้นไม่มีการเคลื่อนไหว ดังนั้นตำแหน่งในวงโคจรค้างฟ้าจึงเรียกว่า "จุดยืน" การโฮเวอร์ทำให้มั่นใจได้ว่าการสื่อสารในระยะยาวจะคงที่ เมื่อวางทิศทางแล้วเสาอากาศจะชี้ไปที่ดาวเทียมที่ต้องการเสมอ

ความเคลื่อนไหว
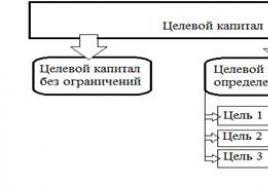
ดาวเทียมสามารถถ่ายโอนจากวงโคจรระดับความสูงต่ำไปยังวงโคจรค้างฟ้าได้โดยใช้ฟิลด์การถ่ายโอนข้อมูลทางภูมิศาสตร์ อย่างหลังเป็นเส้นทางรูปไข่ที่มีจุดที่ระดับความสูงต่ำและจุดสูงสุดที่ระดับความสูงใกล้กับวงกลมค้างฟ้า ดาวเทียมที่ไม่เหมาะสมสำหรับการดำเนินงานต่อไปจะถูกส่งไปยังวงโคจรกำจัดซึ่งอยู่เหนือ GEO 200-300 กิโลเมตร
ความสูงของวงโคจรค้างฟ้า
ดาวเทียมในสนามที่กำหนดจะรักษาระยะห่างจากโลกในระดับหนึ่ง โดยไม่เข้าใกล้หรือเคลื่อนตัวออกไป มันจะอยู่เหนือจุดใดจุดหนึ่งบนเส้นศูนย์สูตรเสมอ จากคุณสมบัติเหล่านี้ แรงโน้มถ่วงและแรงหนีศูนย์กลางจะสมดุลซึ่งกันและกัน ความสูงของวงโคจรค้างฟ้าคำนวณโดยใช้วิธีการตามกลศาสตร์คลาสสิก ในกรณีนี้จะคำนึงถึงความสอดคล้องของแรงโน้มถ่วงและแรงเหวี่ยงด้วย ค่าของปริมาณแรกถูกกำหนดโดยใช้กฎความโน้มถ่วงสากลของนิวตัน ตัวบ่งชี้แรงหนีศูนย์กลางคำนวณโดยการคูณมวลของดาวเทียมด้วยความเร่งสู่ศูนย์กลาง ผลลัพธ์ของความเท่าเทียมกันของมวลความโน้มถ่วงและแรงเฉื่อยคือข้อสรุปว่าระดับความสูงของวงโคจรไม่ได้ขึ้นอยู่กับมวลของดาวเทียม ดังนั้น วงโคจรค้างฟ้าจึงถูกกำหนดโดยระดับความสูงที่แรงเหวี่ยงหนีศูนย์กลางมีขนาดเท่ากันและตรงกันข้ามกับทิศทางของแรงโน้มถ่วงที่สร้างขึ้นโดยแรงโน้มถ่วงของโลกที่ระดับความสูงที่กำหนด
จากสูตรคำนวณความเร่งสู่ศูนย์กลาง คุณสามารถหาความเร็วเชิงมุมได้ รัศมีของวงโคจรค้างฟ้ายังถูกกำหนดโดยสูตรนี้หรือโดยการหารค่าคงที่แรงโน้มถ่วงศูนย์กลางโลกด้วยความเร็วเชิงมุมยกกำลังสอง มีความยาว 42,164 กิโลเมตร เมื่อคำนึงถึงรัศมีเส้นศูนย์สูตรของโลก เราจะได้ความสูงเท่ากับ 35,786 กิโลเมตร
การคำนวณสามารถทำได้อีกวิธีหนึ่งโดยยึดตามคำกล่าวที่ว่า ระดับความสูงของวงโคจรซึ่งเป็นระยะทางจากศูนย์กลางโลกด้วยความเร็วเชิงมุมของดาวเทียมที่สอดคล้องกับการเคลื่อนที่แบบหมุนของดาวเคราะห์ทำให้เกิดเส้นตรง ความเร็วที่เท่ากับความเร็วจักรวาลแรกที่ระดับความสูงที่กำหนด
ความเร็วในวงโคจรค้างฟ้า ความยาว
ตัวบ่งชี้นี้คำนวณโดยการคูณความเร็วเชิงมุมด้วยรัศมีสนาม ค่าของความเร็วในวงโคจรคือ 3.07 กิโลเมตรต่อวินาที ซึ่งน้อยกว่าความเร็วจักรวาลแรกบนเส้นทางใกล้โลกมาก เพื่อลดอัตราจำเป็นต้องเพิ่มรัศมีวงโคจรมากกว่าหกเท่า ความยาวคำนวณโดยการคูณตัวเลข Pi และรัศมีคูณด้วยสอง เป็นระยะทาง 264924 กิโลเมตร ตัวบ่งชี้จะถูกนำมาพิจารณาเมื่อคำนวณ "จุดยืน" ของดาวเทียม
อิทธิพลของกำลัง
พารามิเตอร์ของวงโคจรที่กลไกเทียมหมุนสามารถเปลี่ยนแปลงได้ภายใต้อิทธิพลของการรบกวนจากแรงโน้มถ่วงของดวงจันทร์ - แสงอาทิตย์, ความไม่สอดคล้องกันของสนามโลก, และรูปไข่ของเส้นศูนย์สูตร การเปลี่ยนแปลงของสนามจะแสดงออกมาในปรากฏการณ์เช่น:
- การกระจัดของดาวเทียมจากตำแหน่งไปตามวงโคจรไปสู่จุดสมดุลที่มั่นคง ซึ่งเรียกว่ารูศักย์ในวงโคจรค้างฟ้า
- มุมเอียงของสนามกับเส้นศูนย์สูตรจะเพิ่มขึ้นด้วยความเร็วที่แน่นอนและถึง 15 องศาทุกๆ 26 ปี 5 เดือน
เพื่อให้ดาวเทียมอยู่ใน "จุดยืน" ที่ต้องการ จึงมีการติดตั้งระบบขับเคลื่อนซึ่งจะเปิดหลายครั้งทุกๆ 10-15 วัน ดังนั้น เพื่อชดเชยการเพิ่มขึ้นของความเอียงของวงโคจร จึงมีการใช้การแก้ไข "เหนือ-ใต้" และเพื่อชดเชยการเบี่ยงเบนไปตามสนาม จึงใช้การแก้ไข "ตะวันตก-ตะวันออก" เพื่อควบคุมเส้นทางของดาวเทียมตลอดอายุการใช้งาน จำเป็นต้องมีการจ่ายเชื้อเพลิงจำนวนมากบนเรือ
ระบบขับเคลื่อน

การเลือกอุปกรณ์จะขึ้นอยู่กับคุณสมบัติทางเทคนิคเฉพาะของดาวเทียม ตัวอย่างเช่น เครื่องยนต์จรวดเคมีมีการจ่ายเชื้อเพลิงแบบแทนที่และทำงานบนส่วนประกอบที่มีจุดเดือดสูงที่เก็บไว้เป็นเวลานาน (ไดอะไนโตรเจนเตตรอกไซด์, ไดเมทิลไฮดราซีนที่ไม่สมมาตร) อุปกรณ์พลาสมามีแรงขับน้อยกว่ามาก แต่เนื่องจากการทำงานเป็นเวลานานซึ่งวัดได้ภายในสิบนาทีสำหรับการเคลื่อนไหวครั้งเดียว อุปกรณ์จึงสามารถลดปริมาณเชื้อเพลิงที่ใช้บนเรือได้อย่างมาก ระบบขับเคลื่อนประเภทนี้ใช้เพื่อเคลื่อนย้ายดาวเทียมไปยังตำแหน่งอื่นในวงโคจร ปัจจัยจำกัดหลักในอายุการใช้งานของอุปกรณ์คือการจ่ายเชื้อเพลิงในวงโคจรค้างฟ้า
ข้อเสียของสนามเทียม
ข้อเสียเปรียบที่สำคัญในการโต้ตอบกับดาวเทียมค้างฟ้าคือความล่าช้าอย่างมากในการแพร่กระจายสัญญาณ ดังนั้นที่ความเร็วแสง 300,000 กิโลเมตรต่อวินาทีและระดับความสูงของวงโคจร 35,786 กิโลเมตร การเคลื่อนที่ของลำแสงโลก-ดาวเทียมใช้เวลาประมาณ 0.12 วินาที และลำแสงโลก-ดาวเทียม-โลกใช้เวลา 0.24 วินาที เมื่อคำนึงถึงความล่าช้าของสัญญาณในอุปกรณ์และระบบส่งสัญญาณเคเบิลของบริการภาคพื้นดิน ความล่าช้ารวมของสัญญาณ "ต้นทาง - เครื่องรับสัญญาณดาวเทียม" จะอยู่ที่ประมาณ 2-4 วินาที ตัวบ่งชี้นี้ทำให้การใช้อุปกรณ์ในวงโคจรสำหรับโทรศัพท์มีความซับซ้อนอย่างมากและทำให้ไม่สามารถใช้การสื่อสารผ่านดาวเทียมในระบบเรียลไทม์ได้

ข้อเสียอีกประการหนึ่งคือการมองไม่เห็นวงโคจรค้างฟ้าจากละติจูดสูง ซึ่งรบกวนการสื่อสารและการออกอากาศทางโทรทัศน์ในภูมิภาคอาร์กติกและแอนตาร์กติก ในสถานการณ์ที่ดวงอาทิตย์และดาวเทียมที่ส่งสัญญาณอยู่ในแนวเดียวกับเสาอากาศรับ สัญญาณจะลดลงและบางครั้งก็ไม่มีเลย ในวงโคจรค้างฟ้า เนื่องจากดาวเทียมไม่สามารถเคลื่อนที่ได้ ปรากฏการณ์นี้จึงแสดงออกมาอย่างชัดเจนเป็นพิเศษ
ผลกระทบดอปเปลอร์
ปรากฏการณ์นี้ประกอบด้วยการเปลี่ยนแปลงความถี่ของการสั่นสะเทือนทางแม่เหล็กไฟฟ้าพร้อมกับการเคลื่อนที่ร่วมกันของตัวส่งและตัวรับ ปรากฏการณ์นี้แสดงได้จากการเปลี่ยนแปลงของระยะทางเมื่อเวลาผ่านไป เช่นเดียวกับการเคลื่อนที่ของยานพาหนะเทียมในวงโคจร ผลกระทบดังกล่าวแสดงให้เห็นว่ามีความเสถียรต่ำของความถี่พาหะของดาวเทียมซึ่งเพิ่มความไม่เสถียรของฮาร์ดแวร์ของความถี่ของตัวทวนสัญญาณออนบอร์ดและสถานีภาคพื้นดินซึ่งทำให้การรับสัญญาณยุ่งยาก เอฟเฟกต์ดอปเปลอร์ก่อให้เกิดการเปลี่ยนแปลงความถี่ของการปรับการสั่นสะเทือน ซึ่งไม่สามารถควบคุมได้ ในกรณีที่มีการใช้ดาวเทียมสื่อสารและการแพร่ภาพโทรทัศน์โดยตรงในวงโคจร ปรากฏการณ์นี้จะถูกกำจัดออกไปในทางปฏิบัติ กล่าวคือ ไม่มีการเปลี่ยนแปลงระดับสัญญาณที่จุดรับ
ทัศนคติต่อสนามค้างฟ้าในโลก

การกำเนิดของวงโคจรอวกาศทำให้เกิดคำถามมากมายและปัญหาทางกฎหมายระหว่างประเทศ คณะกรรมการจำนวนหนึ่ง โดยเฉพาะอย่างยิ่งสหประชาชาติ มีส่วนร่วมในมติของพวกเขา บางประเทศที่ตั้งอยู่บนเส้นศูนย์สูตรได้อ้างสิทธิ์ในการขยายอำนาจอธิปไตยของตนไปยังส่วนของพื้นที่ว่างที่อยู่เหนืออาณาเขตของตน รัฐต่างๆ ระบุว่าวงโคจรค้างฟ้าเป็นปัจจัยทางกายภาพที่เกี่ยวข้องกับการมีอยู่ของดาวเคราะห์และขึ้นอยู่กับสนามโน้มถ่วงของโลก ดังนั้นส่วนของสนามจึงเป็นส่วนขยายของอาณาเขตของประเทศของตน แต่คำกล่าวอ้างดังกล่าวถูกปฏิเสธ เนื่องจากโลกมีหลักการไม่จัดสรรพื้นที่รอบนอก ปัญหาทั้งหมดที่เกี่ยวข้องกับการทำงานของวงโคจรและดาวเทียมได้รับการแก้ไขในระดับโลก