Żuraw pływający Czernomorec o udźwigu 100 t. Żurawie pływające (dźwigi pływające)
W 1964 roku Lengiprotransmost opracował projekt żurawia pływającego PRK-100 o udźwigu 100 T przeznaczony do prac montażowych i przeładunkowych przy budowie mostów oraz na budowach w pobliżu zbiorników wodnych.
Żuraw jest składany, maksymalna waga pojedynczego elementu nie przekracza 7 T... Żuraw można przetransportować na plac budowy zarówno koleją, jak i samochodem, ponieważ wszystkie elementy żurawia z łatwością mieszczą się w gabarytach kolejowych i drogowych.
Żuraw osadzony jest na przygotowanym wcześniej na budowie pontonie złożonym z 24 pontonów typu KS. Montaż nadbudówki dźwigu na gotowym pontonie trwa 12 - 15 dni w obecności 10 dźwigów montażowych (samochodowych lub pływających). Demontaż żurawia odbywa się w ciągu 10-12 dni.
Żuraw PRK-100 wyposażony jest w dwa haki: główny o udźwigu 100 t oraz pomocniczy o udźwigu 30 T... Z obciążeniem na haku do 30 T górną część żurawia można obracać o 90 ° w obu kierunkach. Skręcanie odbywa się za pomocą wciągarki zamontowanej na pontonie. Z ładunkiem ważącym ponad 30 Tżuraw skręca z pontonem. W tym przypadku urządzenia zagłuszające montuje się pod zawiasami podporowymi wysięgnika oraz w tylnej części obrotnicy. Manewry dźwigiem na wodzie zapewniają cztery wyciągarki papillonage wyposażone w maszyny do układania lin, a także cały sprzęt niezbędny do pracy papillonage.
Wszystkie wciągarki dźwigowe, w tym 3 ładunkowe i 1 wysięgnik, działają z własnej elektrowni AD-75T/400 o mocy 75 kw zainstalowany na pontonie dźwigu. Sterowanie napędem elektrycznym jest skoncentrowane w kabinie operatora żurawia.
Żuraw PRK-100 różni się od dotychczasowych uniwersalnych pływających żurawi pełnoobrotowych niską wagą, montażem, małym zanurzeniem. Koszt jego wytworzenia jest 6 razy niższy niż w przypadku żurawi uniwersalnych, obsługuje go 4 osoby zamiast 10.
Prototypowy żuraw PRK-100, produkowany przez Zakład Remontów Mechanicznych Uglich, przeszedł wszystkie testy i jest obsługiwany przez Załogę Budowy Mostów nr 11 w Leningradzie nad rzeką. Neva działa od 1,5 roku. Komitet akceptacyjny Ministerstwa Transportu i Budownictwa ZSRR zalecił go do produkcji seryjnej.

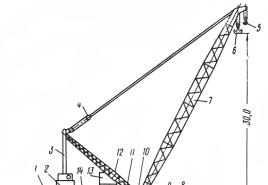
| Schemat konstrukcyjny żurawia PRK-100 |
Charakterystyka techniczna żurawia PRK-100
| Najwyższa nośność, TC: | |
| na głównym haku | 100 |
| na haku pomocniczym | 30 |
| Przydatny wysięg bomu (od strony pontonu), m: | |
| z obciążeniem 100 T: najmniejszy | 3 |
| . z obciążeniem 100 T: największy | 10 |
| . z obciążeniem 30 T: najmniejszy | 5 |
| . z obciążeniem 30 T: największy | 22 |
| Wysokość podnoszenia haka od powierzchni wody, w wysięgu 10 m, m | 30 |
| Prędkość podnoszenia (na haku głównym/pomocniczym), m / min | 1,7 / 3 |
| Prędkość obrotu żurawia z obciążeniem 30 T na haku, obr./min | 0,11 |
| Prędkość ruchu żurawia z wyciągarkami papillon, obr./min | 5 |
| Zanurzenie (podczas pracy dźwigu), m | 1,6 |
| Waga nadbudowy (bez pontonu), T | 215 |
GANZ- jeden z najstarsze marki dźwigów pływających na świecie, jest reprezentowana przez pełną gamę modeli, które zgodnie z przeznaczeniem dźwigów pływających można sklasyfikować jako:
Dźwigi pływające z chwytakiem towarowym
Nośność od 5 do 60 ton. W pełni obrotowy, z wysięgnikiem prostym lub przegubowym ze sztywną linką naciągową. Holowany lub samobieżny. Wykonanie w pełni autonomiczne lub z zegarkiem zmianowym. Do obsługi dużych ilości wszelkiego rodzaju ładunków masowych / masowych. Dzięki połączeniu zwiększonej wyporności, stabilności i odchylenia konstrukcji dźwigu pływającego jako całości, z dużą szybkością wykonywania wszystkich podstawowych operacji uzyskuje się wysoką wydajność przeładunkową: od 300 do 2000 ton/godz. Mogą mieć klasę rzeczną i morską, a także klasę wydajności lodowej. W żurawiach pływających powyżej 5 ton stosuje się chwytak 4-linowy. Służą jako pogłębiarka denna z możliwością wyposażenia w przenośnik taśmowy do rozładunku urobku. Możliwość pracy w trybie hakowym, w którym udźwig jest zwiększony, ale prędkość operacji jest zmniejszona.
Pływające dźwigi hakowe do ładunków
Nośność od 5 do 200 ton. W pełni obrotowy, z wysięgnikiem prostym lub przegubowym ze sztywną linką naciągową. Holowany lub samobieżny. Wykonanie w pełni autonomiczne lub z zegarkiem zmianowym. Do przenoszenia kawałków i ciężkich ładunków. Przy innych podobieństwach cech, od dźwigów pływających z chwytakiem ładunkowym, wyróżniają się one obecnością zmniejszonych prędkości do wykonywania podstawowych operacji wymaganych do dokładniejszej pracy. Mogą mieć klasę rzeczną i morską, a także klasę wydajności lodowej.
Dźwigi pływające instalacyjno-budowlane
Nośność od 16 do 300 ton. W pełni obrotowy, z wysięgnikiem prostym lub przegubowym ze sztywną linką naciągową. Holowany lub samobieżny. Wykonanie w pełni autonomiczne lub z zegarkiem zmianowym. Wykorzystywane są w budownictwie okrętowym, ciężkim, energetycznym, transportowym, budowie mostów i budowli hydrotechnicznych, a także w pracach nad zagospodarowaniem szelfu morskiego. Wyróżnia się pracą przy obniżonych prędkościach: 1-12 metrów/minutę. Mogą mieć klasę rzeczną i morską, a także klasę wydajności lodowej.
Montaż i ratownictwo dźwigów pływających
Nośność od 200 do 500 ton i więcej. Z prostym, skośnym systemem stałego wysięgnika. Holowany lub samobieżny. Wykonanie w pełni autonomiczne lub z zegarkiem zmianowym. Zgodnie z przeznaczeniem mogą być wyposażone w różne urządzenia pomocnicze. Wykorzystywane są w budownictwie okrętowym, ciężkim, energetycznym, transportowym, budowie mostów i budowli hydrotechnicznych, pracach nad zagospodarowaniem szelfu morskiego oraz ratownictwie podwodnym. Szybki tryb pracy: 0,1-5 metrów/minutę. Mogą mieć klasę rzeczną i morską, a także klasę wydajności lodowej. Istnieje możliwość wyposażenia wysięgnika w pień do pracy z ładunkami mniejszymi niż znamionowy udźwig w przypadkach, gdy wymagany jest bardzo duży zasięg wysięgnika.
Pływający dźwig- niezwykle wszechstronny i niezawodny sprzęt. Służą do załadunku i rozładunku statków, pogłębiania dna, budowy mostów i innych konstrukcji wodnych.
Pływający dźwig praktycznie niezastąpiony w porcie do prac wielozadaniowych, dzięki czemu stosunkowo wysoki koszt zwraca się w krótkim czasie.
- Żuraw pływający o udźwigu 16 t
- Żuraw pływający o udźwigu 32 t (Al Furat)
- Żuraw pływający o udźwigu 32 t (Hafez)
- Żuraw pływający o udźwigu 100 t (El Mansour)

Pływający dźwig to żuraw do podnoszenia ładunków zainstalowany na stałe na specjalnym statku, zarówno z własnym napędem, jak i bez własnego napędu, przeznaczony do wykonywania operacji podnoszenia i przenoszenia.
2.1.1. Informacje ogólne
W przeciwieństwie do innych typów dźwigów, dźwigi pływające posiadają pomieszczenia mieszkalne dla załogi (załoga stała), warsztaty naprawcze i montażowe, kantyny, dodatkowe wyposażenie statku, mechanizmy pokładowe oraz własne elektrownie, które pozwalają dźwigowi na autonomiczną pracę z dala od brzegu. Mechanizmy dźwigów pływających są zwykle spalinowo-elektryczne. Istnieje również możliwość doprowadzenia energii elektrycznej z lądu. Jako śmigła stosuje się śmigła lub śmigła łopatkowe. Te ostatnie nie wymagają urządzenia sterującego i mogą przesuwać żuraw do przodu, do tyłu, na boki (opóźnienie) lub obracać się w miejscu.
W zależności od dróg wodnych dźwigi pływające podlegają Rosyjskiemu Morskiemu Rejestrowi Statków lub Rosyjskiemu Rejestrowi Rzecznemu.
Zgodnie z wymogami Rejestru Morskiego dźwigi pływające muszą być wyposażone we wszystkie urządzenia wymagane dla statków, tj. muszą posiadać odbojnice (drewniane belki wystające wzdłuż zewnętrznej części wolnej burty statku w sposób ciągły lub częściowy, chroniące poszycie boczne przed uderzeniami innych statków i konstrukcji), iglice (mechanizmy okrętowe w postaci pionowych kołnierzy do podnoszenia i zwalniania kotwic , podnoszenie ciężarów, ciągnięcie lin cumowniczych i inne), pachołki (sparowane pachołki ze wspólną płytą na pokładzie statku, przeznaczone do mocowania na nich lin), kotwice i wciągarki kotwiczne, a także sygnalizatory świetlno-dźwiękowe, łączność radiowa , pompy odwadniające i sprzęt ratunkowy. Podczas pracy dźwig pływający musi mieć zapas świeżej wody, żywności, paliwa i smarów zgodnie z normami na czas autonomicznej nawigacji. Główne wymagania stawiane pontonom dźwigów pływających to wytrzymałość konstrukcyjna, wyporność i stateczność.
W przypadku transportu śródlądowymi drogami wodnymi całkowita wysokość dźwigu w stanie złożonym musi być zgodna z GOST 5534 i być przypisana z uwzględnieniem wymiarów mostu i możliwości przejścia pod napowietrznymi liniami energetycznymi.
Celowo żurawie można sklasyfikować w następujący sposób:
Dźwigi przeładunkowe(ogólnego przeznaczenia), przeznaczone do przeładunków masowych (ich opis przedstawiono w pracach). Według GOST 5534 udźwig przeładunkowych dźwigów pływających wynosi 5, 16 i 25 ton, maksymalny wysięg to 30 ... 36 m, minimalny to 9 ... 11 m, wysokość podnoszenia haka nad poziom wody wynosi 18,5 ... 25 m, głębokość zatopienia znajduje się poniżej poziomu wody (na przykład w ładowni statku) - nie mniej niż 11 ... 20 m (w zależności od nośności), prędkość podnoszenia 1,17 ... 1,0 m / s (70 ... 45 m / min), szybkość zmiany odjazdu 0,75 ... 1,0 m / s (45 ... 60 m / min), częstotliwość obrotu 0,02 ... 0,03 s -1 (1,2 ... 1,75 obr./min). Są to takie żurawie, jak na przykład - „Ganz”, wyprodukowany na Węgrzech (ryc. 2.1.), Dźwigi domowe (ryc. 2.2).
Dźwigi specjalnego przeznaczenia(ciężki) - do obsługi ciężkich ładunków, prac budowlanych, montażowych, stoczniowych i ratowniczych.
Żurawie pływające przeznaczone do prac instalacyjnych znajdują zastosowanie przy budowie konstrukcji hydrotechnicznych, do pracy w stoczniach stoczniowych i remontowych.
Żuraw niemieckiej firmy „Demag” o udźwigu 350 ton został użyty podczas przebudowy mostów leningradzkich, podczas montażu
80-tonowe suwnice bramowe przy przenoszeniu suwnic z jednego obszaru portu do drugiego itp.
Żuraw z przystawki odbioru mocy sadzić je. SM Kirow o nośności 250 ton został wyprodukowany do instalacji platform wiertniczych na Morzu Kaspijskim.
Żurawie „Czernomorec” o udźwigu 100 ton i „Bogatyr” o udźwigu 300 ton (ryc. 2.3) otrzymały Nagrodę Państwową ZSRR.

Ryż. 2.2. Pływające żurawie przeładunkowe o udźwigu 5 ton ( a) i 16 ton ( b): 1 - chwyć za największy wysięg; 2 - pień; 3 - strzała w sposób marszowy; 4 - nacisk; 5 - strzałka w sposób działający; 6 - ponton; 7 - chwyć za najmniejszy zasięg; 8 - kabina; 9 - podpora obrotowa; 10 - kolumna; 11 - urządzenie równoważące połączone z mechanizmem zmiany wyjścia; 12 - przeciwwaga

Ryż. 2.3. Dźwig pływający „Bogatyr” o udźwigu 300 ton (zakład Sewastopol im. S. Ordzhonikidze): 1 - ponton; 2 - wysięgnik w sposób marszowy; 3 - zawieszenie podnośnika pomocniczego; 4 - zawieszenie głównego wyciągu; 5 - strzałka
Żuraw Vityaz (ryc. 2.4) o udźwigu 1600 ton służy do pracy z ciężkimi ładunkami, na przykład podczas montażu na podporach zamontowanych na konstrukcjach brzegowych mostu przez rzekę. Oprócz wciągnika głównego, żuraw ten posiada wciągnik pomocniczy o udźwigu 200 ton. Wysięg wciągnika głównego wynosi 12 m, wciągnika pomocniczego 28,5 m. Dostępne są dźwigi pływające o większym udźwigu.
Dźwigi specjalne do przenoszenia dużych ciężarów w portach, prac instalacyjnych i budowlanych przy budowie statków, remontach statków i budowie elektrowni wodnych, akcjach ratowniczych, posiadają nadbudówki w pełni obrotowe. Nośność - od 60 (dźwig "Astrachań") do 500 ton, na przykład: "Czernomorec" - 100 ton, "Sewastopolca" - 140 ton (ryc. 2.5), "Bogatyr" - 300 ton, "Bogatyr-M" - 500 ton ... Na ryc. 2.6 pokazuje żurawie „Bogatyr” z różnymi modyfikacjami wysięgników i odpowiednimi wykresami udźwigu, zmiennym w wysięgu.
Specjalistyczne dźwigi do podnoszenia statków i akcji ratowniczych oraz montażu dużych ciężkich konstrukcji z reguły nie obracają się.

Ryż. 2.5. Dźwig pływający „Sewastopolec” o udźwigu 140 ton (zakład Sewastopol im. S. Ordzhonikidze): 1 - ponton; 2 - wysięgnik w sposób marszowy; 3 - strzałka w sposób działający
|

Ryż. 2.6. Dźwigi pływające: a- „Bogatyr”; b- „Bogatyr-3” z dodatkowym wysięgnikiem; v- „Bogatyr-6” z przedłużonym dodatkowym wysięgnikiem; Q- dopuszczalna ładowność na wylocie r; h- wysokość podnoszenia
Przykładami takich dźwigów są: „Volgar” - 1400 ton; „Vityaz” - 1600 ton (ryc. 2.4), podnoszenie ładunku o masie 1600 ton odbywa się za pomocą wciągarki trzech wciągników pokładowych, Magnus (Magnus, Niemcy) o nośności od 200 do 1600 ton (ryc. 2.7), Balder (Balder, Holandia) o nośności od 2000 do 3000 ton (ryc. 2.8).
Pole naftowe. Statki suwnicowe do zaopatrywania morskich pól naftowych oraz budowy instalacji wydobycia ropy i gazu na szelfie mają zwykle obrotowe nadstawy, znaczny wysięg i udźwig oraz są zdolne do obsługi stałych platform wiertniczych. Takie dźwigi obejmują na przykład Jakub Kazimow - o udźwigu 25 ton (ryc. 2.9), Kerr-ogly - o udźwigu 250 ton. W związku z rozwojem szelfu kontynentalnego istnieje tendencja do wzrostu parametrów dźwigów tej grupy (udźwig - do 2000...2500 ton i więcej).

Ryż. 2.7. Dźwig pływający "Magnus" o udźwigu 800 ton (HDW, Niemcy): 1 - ponton; 2 - wysięgnik w sposób marszowy; 3 - wciągarka pokładowa; 4 - wciągarka uchylna wysięgnika; 5 - klamra; 6 - strzałka; 7 - wysięgnik; 8 - zawieszenie głównego wyciągu; 9 - zawieszenie podnośnika pomocniczego

Ryż. 2.8. Dźwig pływający "Balder" o udźwigu 3000 ton ("Gusto", Holandia - ( a) oraz harmonogram zmian dopuszczalnej ładowności Q od wyjazdu r (b)):
1 - ponton; 2 - gramofon; 3 - strzałka; I ... IV - wieszaki na haki

Ryż. 2.9. Statek dźwigowy „Jakub Kazimow”: 1 - ponton; 2 - wysięgnik w sposób marszowy; 3 - zblocze wyrównawcze; 4 - kabina; 5 - rama części obrotowej
W zależności od zdolności żeglugowej, żurawie można sklasyfikować w następujący sposób:
1) port (do przeprowadzania przeładunków w portach i przystaniach, zbiornikach zamkniętych oraz obszarach przybrzeżnych (przybrzeżnych) i rzecznych, w stoczniach stoczniowych i remontowych);
2) zdatny do żeglugi (do pracy na otwartym morzu z możliwością długich samodzielnych przejść).
Krajowa branża dźwigowa charakteryzuje się chęcią tworzenia dźwigów uniwersalnych, a zagraniczna - dźwigów wysokospecjalistycznych.
2.1.2. Budowa dźwigów pływających
Żurawie pływające składają się z burty (właściwego żurawia) i pontonu (statku specjalnego lub żurawia).
Górna konstrukcja dźwigu pływającego, statku dźwigowego itp.- urządzenie podnoszące zainstalowane na pokładzie otwartym, przeznaczone do przenoszenia urządzenia podnoszącego i ładunku.
Pontony, podobnie jak kadłuby statków, składają się z elementów poprzecznych (wręgi i pokładniki) i podłużnych (kil i stępka), pokrytych blachą stalową.
Rama - zakrzywiona belka poprzeczna zestawu kadłuba statku, zapewniająca wytrzymałość i stabilność burt i dna.
Belka- belka poprzeczna łącząca prawą i lewą gałąź ramy. Pokład układany jest na belkach.
Kil- ściąg wzdłużny, montowany w płaszczyźnie średnicy statku na dnie, rozciągający się na całej jego długości. Stępka statków dużych i średnich (wewnętrzna pionowa) to blacha montowana w płaszczyźnie średnicy pomiędzy pokładem dna podwójnego a poszyciem dna. Aby zmniejszyć kołysanie, ustaw boczne kile prostopadle do zewnętrznej powłoki statku. Długość stępki bocznej wynosi do 2/3 długości statku.
Kilson- ściąg wzdłużny na statkach bez dna podwójnego, montowany wzdłuż dna i łączący dolne części wręgów w celu ich wspólnej pracy.
Pontony mają kształt równoległościanu z zaokrąglonymi narożnikami lub mają liny okrętowe. Pontony o prostokątnych narożnikach mają płaskie dno i wycięcie w części rufowej (lub dziobowej) (ryc. 2.10). Czasami dźwig jest montowany na dwóch pontonach (dźwig katamaranowy). W takich przypadkach każdy ponton ma mniej lub bardziej wyraźny kil i kształt zbliżony do kształtu kadłubów statków konwencjonalnych. Pontony pływających dźwigów bywają wykonane niezatapialne, tj. zapewnić grodzie wzdłużne i poprzeczne. Aby zwiększyć stabilność dźwigu pływającego, tj. możliwość powrotu z pozycji odchylonej do pozycji równowagi po zdjęciu ładunku, należy w miarę możliwości obniżyć jego środek ciężkości. W tym celu należy unikać wysokich nadbudówek, a wewnątrz pontonu umieścić pomieszczenia mieszkalne dla załogi dźwigu oraz magazyny. Na pokład wyprowadza się jedynie sterówkę (kabinę sterowniczą statku), kambuz (kuchnię okrętową) i jadalnię. Wewnątrz pontonu, wzdłuż jego boków, znajdują się zbiorniki (cysterny) na olej napędowy i świeżą wodę.
Żurawie pływające mogą być samobieżne i bez własnego napędu. Jeżeli żuraw ma obsługiwać wiele portów lub pokonywać duże odległości, musi być samobieżny. W tym przypadku stosuje się pontony z linami okrętowymi. Żurawie zdatne do żeglugi mają pontony z konturami statków, wiele ciężkich dźwigów korzysta z pontonów katamaranowych (Ker-oglu o udźwigu 250 ton; dźwig z Vyartsilya w Finlandii o udźwigu 1600 ton itp.).
Poprzez budowę nadbudówki Dźwigi pływające można podzielić na dźwigi nieobrotowe, pełnoobrotowe i kombinowane.
Naprawiony(maszt, suwnica, z wahliwymi (przechylanymi) strzałami). Suwnice masztowe (ze stałymi masztami) są proste w konstrukcji i tanie. Ruch poziomy ładunku odbywa się podczas ruchu pontonu, więc wydajność takich żurawi jest bardzo niska.

Ryż. 2.10. Schemat pływającego pontonu dźwigowego
Do podnoszenia ciężkich ładunków bardziej odpowiednie są żurawie pływające z wysięgnikami uchylnymi. Przy zmiennym zasięgu ich wydajność jest większa niż w przypadku masztów. Dźwigi te charakteryzują się prostą konstrukcją, niskimi kosztami i dużym udźwigiem. Wysięgnik dźwigu składa się z dwóch nóg, zbiegających się w górę pod ostrym kątem i posiada zawias mocujący w dziobie pontonu. Wysięgnik jest podnoszony za pomocą sztywnego pręta (siłownik hydrauliczny, zębatka lub urządzenie śrubowe) lub za pomocą mechanizmu wciągnika łańcuchowego (na przykład na dźwigu Vityaz). Strzałka w pozycji transportowej jest zamocowana na specjalnym wsporniku (rys. 2.3). Do wykonania tej operacji używany jest wysięgnik i wyciągarka pomocnicza.
Pływająca suwnica bramowa to konwencjonalna suwnica bramowa zamontowana na pontonie. Most dźwigu znajduje się wzdłuż osi podłużnej pontonu, a jego jedyny wspornik wystaje poza obrys pontonu na odległość nazywaną czasem zasięgiem zewnętrznym. Zasięg zewnętrzny wynosi zwykle 7...10 m. Udźwig suwnic pływających sięga 500 ton. Jednak ze względu na dużą zawartość metalu suwnice pływające nie są produkowane w naszym kraju.
W pełni obrotowy Suwnice (uniwersalne) są dostępne z obrotnicą lub kolumną. Obecnie szeroko stosowane są żurawie obrotowe z wysięgnikiem uchylnym. Są najbardziej produktywni. Ich strzały nie tylko przechylają się, ale obracają wokół pionowej osi. Udźwig żurawi obrotowych jest bardzo zróżnicowany i może sięgać setek ton.
Żurawie pełnoobrotowe obejmują żuraw Bogatyr o udźwigu 300 ton i wysięgu zewnętrznym 10,4 m z wysokością podnoszenia haka głównego (haka) nad poziomem morza 40 m, a także transport i montaż morski Ilya Muromets naczynie. Ten ostatni ma udźwig 2 × 300 ton przy zewnętrznym wysięgu 31 m. Wysokość dźwigu z podniesionym wysięgnikiem wynosi 110 m. Żurawie te są zdolne do żeglugi morskiej podczas sztormu 6 ... 7 punktów i wiatr 9 punktów. Trwałość żeglugi to 20 dni. Prędkość żurawia Bogatyra wynosi 6 węzłów, a żurawia Ilya Muromets 9 węzłów. Oba statki są wyposażone w zestaw mechanizmów i urządzeń zapewniających wysoki poziom mechanizacji procesów głównych i pomocniczych. W pozycji transportowej strzały obu opisanych statków są ułożone na specjalnych podporach i zamocowane.
Łączny... Należą do nich np. suwnice pływające, po których mostku porusza się żuraw obrotowy.
Dominującym typem urządzenia wysięgnikowego żurawi pływających jest wysięgnik prosty z wciągnikiem łańcuchowym wyrównawczym; rzadziej stosowane są urządzenia z wysięgnikiem przegubowym, jednak ich użycie obarczone jest trudnościami w układaniu w marszowy sposób.
Aby wykluczyć przewracanie się prostych strzał dźwigów morskich podczas falowania, pod wpływem sił bezwładności i wiatru, a także przy pękaniu i opadaniu ładunku, strzały są wyposażone w urządzenia zabezpieczające w postaci ograniczników krańcowych lub specjalnych systemów równoważących. W żurawiach Magnus wysięgnik z ładunkiem jest utrzymywany na miejscu za pomocą sztywnego wspornika.
Wraz z rozwojem konstrukcji wysięgników nastąpiło przejście od wysięgników kratowych i niekątowych do wysięgników pełnościennych (w kształcie skrzyni, rzadziej rurowych) w konstrukcji dźwigarowej lub podwieszonej. W żurawiach z ostatnich lat produkcji coraz częściej stosuje się wysięgniki w kształcie skrzyni. Znane są jednak wysięgniki kratowe niektórych zagranicznych żurawi o bardzo dużym udźwigu (dźwig „Balder”, patrz rys. 2.8). Podczas modernizacji żurawi wysięgniki bazowe są często przedłużane o dodatkowe wysięgniki wahliwe (patrz rys. 2.6), co znacznie zwiększa maksymalny zasięg i wysokość podnoszenia, a jednocześnie zapewnia szeroką unifikację z modelem bazowym.
Główne typy łożysk wieńcowych żurawi pływających to kolumny obrotowe i nieobrotowe, wielorolkowe wieńce obrotowe, wieńce obrotowe w postaci dwurzędowego łożyska tocznego. Istnieje tendencja do stosowania wieńc obrotowych w postaci łożysk tocznych w żurawiach o udźwigu do 500 ton. W cięższych żurawiach nadal stosowane są wielorolkowe wieńce obrotowe, trwają prace nad stworzeniem segmentowych łożysk wałeczkowych do takich żurawi.
Mechanizmy podnoszące stosowane w żurawiach pływających to wciągarki chwytakowe z niezależnymi bębnami i wyłącznikami różnicowymi. Według GOST 5534 zapewniona jest zmniejszona prędkość lądowania chwytaka na ładunku, która wynosi 20 ... 30% głównej prędkości. Możliwa jest wymiana chwytaka na zawieszenie hakowe.
Mechanizmy obrotu (jeden lub dwa) często mają przekładnie walcowo-stożkowe z wielotarczowymi sprzęgłami ograniczającymi moment obrotowy i otwartym kołem zębatym lub napędem sworzniowym.
Mechanizm zwisu jest sektorowy z instalacją sektorów na ramieniu przeciwwagi lub hydraulicznym z siłownikiem hydraulicznym połączonym z platformą i prętem połączonym z ramieniem przeciwwagi. Znane żurawie z mechanizmem śrubowym do zmiany wyjazdu. Projekty mechanizmów zmiany wysięgu przedstawiono w rozdziale 1 „Żurawie bramowe”.
Pływające żurawie przeładunkowe chwytakowe w portach rzecznych i morskich są bardzo intensywnie wykorzystywane. Dla mechanizmów podnoszących wartości PV osiągają 75...80%, mechanizmy wahadłowe - 75%, mechanizmy zmiany zwisu - 50%, ilość uruchomień na godzinę - 600.
2.1.3. Funkcje obliczeniowe
Geometria pontonu. Przy projektowaniu i obliczaniu pontonu rozpatruje się w trzech wzajemnie prostopadłych płaszczyznach (patrz rys. 2.10). Płaszczyzna główna to płaszczyzna pozioma styczna do dna pontonu. Jedna z płaszczyzn pionowych, tzw. płaszczyzna średnicowa, biegnie wzdłuż pontonu i dzieli go na równe części. Za oś przyjmuje się linię przecięcia płaszczyzny głównej i średnicowej x... Inna pionowa płaszczyzna przebiega przez środek długości pontonu i jest nazywana ramą śródokręcia lub płaszczyzną śródokręcia. Linia przecięcia płaszczyzny głównej i środkowej jest traktowana jako oś Tak, oraz linia przecięcia płaszczyzny środkowej i średnicowej - dla osi Z.
Płaszczyzna równoległa do płaszczyzny środkowej i przechodząca przez oś obrotu żurawia nazywana jest płaszczyzną środkową. Linie przecięcia powierzchni kadłuba pontonu z płaszczyznami równoległymi do płaszczyzny części środkowej nazywane są wręgami (jest to również nazwa poprzecznych elementów statku, które tworzą ramę jego kadłuba). Linie przecięcia powierzchni kadłuba pontonu z płaszczyznami równoległymi do płaszczyzny głównej nazywane są liniami wodnymi. Taką samą nazwę nosi ślad lustra wody na kadłubie pontonu.
Ponieważ ponton, który znajduje się na wodzie, można przechylić, powstałą linię wodną nazywamy efektywną. Płaszczyzna wodnicy roboczej, która nie jest równoległa do płaszczyzn pozostałych wodnic, dzieli ponton na dwie części: powierzchniową i podwodną. Wodnicę odpowiadającą położeniu na wodzie dźwigu bez obciążenia, wyważonego w taki sposób, aby jego główna płaszczyzna była równoległa do powierzchni wody, nazywana jest wodnicą główną.
Przechylanie statku na dziób lub rufę nazywa się trymem, a przechylanie statku na prawą lub lewą burtę nazywa się przechyleniem. Zastrzyk ψ (patrz rys. 2.10) pomiędzy działającą a główną linią wodną w płaszczyźnie środkowej nazywa się kątem przegłębienia, a kąt θ między tymi samymi liniami w płaszczyźnie śródokręcia - kąt przechyłu. Przy różnicowaniu do dziobu i przechylaniu w kierunku bomu kąty ψ oraz θ są uważane za pozytywne.
Długość L ponton jest zwykle mierzony wzdłuż głównej linii wodnej, szacunkowa szerokość b ponton - w najszerszym miejscu pontonu wzdłuż linii wodnej i wysokości projektowej h bok - od płaszczyzny głównej do linii bocznej pokładu (patrz rys. 2.10). Odległość od głównej płaszczyzny do bieżącej linii wodnej nazywa się zanurzeniem. T ponton, który ma różne znaczenia na dziobie pontonu NS i na rufie T K... Różnica wartości T H - T K zwany przycinaniem. Różnica między wysokością a zanurzeniem H - T zwany wzrostem F Darmowa deska. Jeśli kształt pontonu nie jest równoległościanem, tj. ma gładkie kontury, następnie do obliczeń sporządzany jest tzw. rysunek teoretyczny, który określa kształt zewnętrzny kadłuba (kilka przekrojów wzdłuż wręgów). Przy pontonach prostokątnych nie ma potrzeby rysowania takiego rysunku.
Tom V podwodna część pontonu nazywana jest wyporem wolumetrycznym. Środek ciężkości tego tomu nazywany jest środkiem wielkości i jest oznaczony przez CV. Masa wody w objętości V zwane przemieszczeniem masy D.
Stateczność dźwigów pływających. Stabilność to zdolność statku do powrotu do pozycji równowagi po ustaniu sił powodujących jego przechylenie.
Cechy obliczania stateczności żurawi pływających sprowadzają się w dużej mierze do uwzględnienia wpływu przechyłu i przegłębienia. Żuraw bez ładunku powinien być trymowany na rufie, a z ładunkiem - na dziobie. Jeżeli wysięgnik znajduje się w płaszczyźnie środkowej bez obciążenia, dźwig powinien być pochylony w kierunku przeciwwagi, a z ładunkiem w kierunku ładunku. Zmiana odjazdu z powodu przechyłu lub trymu może wynosić kilka metrów. Wysięg jest rozumiany jako wysięg, który ma dźwig, gdy ponton znajduje się w pozycji poziomej.
W przypadku żurawia z ładunkiem część obrotowa żurawia z przeciwwagą tworzy moment, który częściowo równoważy moment obciążenia i nazywa się przeciwwagą (patrz rys. 2.10): M У = G K y K, gdzie G K- ciężar nadbudówki; y K- odległość od osi obrotu żurawia do środka ciężkości nadbudówki (wraz z przeciwwagami).
W przypadku żurawi z ruchomymi przeciwwagami moment równoważący jest definiowany jako suma momentów z obciążników nadbudówki i przeciwwag.
Moment obciążenia M = GR,gdzie G - ciężar ładunku haka; r- zasięg wysięgnika. Stosunek momentu równoważącego do momentu obciążenia nazywamy współczynnikiem równoważącym φ = M U / M G.
Aby określić momenty przechylające i przycinające, rozważ ryc. 2.11, który pokazuje ponton i bom w planie. Waga części obrotowej żurawia z ładunkiem G K przymocowany na odległość mi poza osią 1 obrót wysięgnika. Działanie wagi G K na ramieniu mi można zastąpić siłą pionową G K w punkcie 1 i chwila G K e w płaszczyźnie wysięgnika. Waga pontonu z balastem G 0 dołączony w punkcie O 2... Ponadto na żuraw działa pionowy moment od obciążenia wiatrem, który ma składowe względem odpowiednich osi M BX oraz M BY... Wtedy moment przechylający jest określany przez zależność formy M K = M X = G K e sałata φ + M BX i moment przycinania M D = M Y = G K e grzech φ + M w Y.
Aby określić moment przywracający, rozważ ryc. 2.12, który przedstawia przekrój pontonu wzdłuż płaszczyzny śródokręcia w pozycjach przed i po przyłożeniu momentu przechylającego. Zaznaczono środek ciężkości żurawia z pontonem CT... Na dźwig, który jest w spoczynku, działają siły pionowe, które mają wypadkową n i pływalności D = Vρg, gdzie V- przemieszczona objętość; ρ - gęstość wody; g- przyśpieszenie grawitacyjne. Zgodnie z prawem Archimedesa, D = N.
W stanie równowagi sił n oraz D działaj wzdłuż jednego pionowego, przechodząc przez środek ciężkości i środek wielkości i zwany osią pływania. W takim przypadku kąt przechyłu może mieć pewną wartość. θ (patrz rysunek 2.10).

Ryż. 2.11. Schemat wyznaczania momentów przechylających i przycinających

Ryż. 2.12. Wykres pozycji pontonu do ( a) i po ( b) zastosowanie momentu przechylającego
Załóżmy, że na dźwig działa statyczny moment przechylający M K spowodowane np. masą ładunku g na końcu wysięgnika żurawia. W tym przypadku przesuwa się środek wielkości. Zmiana sił D oraz g w porównaniu ze stanem równowagi można go pominąć, ponieważ ciężar ładunku jest znacznie mniejszy niż ciężar dźwigu. Wtedy siła D przechylony kran zostanie przymocowany w miejscu CV(rys. 2.12, b). W takim przypadku nastąpi moment przywracania sił D oraz N = D na ramieniu ja moment przechyłu M K, tj. , gdzie jest poprzeczną wysokością metacentryczną, tj. odległość od metacentrum do środka ciężkości.
Punkt nazywa się metacentrum. F przekroczenie osi pływania z linią działania siły D, a promień metacentryczny to odległość od metacentrum F do środka wielkości.
Po zróżnicowaniu pod kątem ψ
moment przywracający jest równy momentowi przycinającemu M D, tj. ![]() , gdzie jest podłużną wysokością metacentryczną; a- odległość między środkami ciężkości i wielkości. Produkty nazywane są współczynnikami stabilności statycznej.
, gdzie jest podłużną wysokością metacentryczną; a- odległość między środkami ciężkości i wielkości. Produkty nazywane są współczynnikami stabilności statycznej.
Zdefiniujmy promienie metacentryczne i. Z teorii statku znane jest:
1) pod małymi kątami toczenia θ i przycinaj ψ pozycja metacentrum F jest niezmienna, a środek wielkości porusza się po łuku koła opisanego wokół metacentrum;
2) promień metacentryczny R = J / V, gdzie J- moment bezwładności obszaru ograniczonego wodnicą względem odpowiedniej osi, wokół której przechyla się dźwig.
W przypadku żurawia w stanie spoczynku obszar ograniczony linią wodną to BL.
Dla pontonu prostokątnego (z wyłączeniem konturów i skosów) momenty bezwładności wokół głównych osi J X = LB 3/12; J Y = B L 3/12 i wyparta objętość wody V = B L T... W tym przypadku promienie metacentryczne; ![]() .
.
Zatem kąty przechyłu i przegłębienia, w zależności od momentów przechylających i przycinających, są określane z wyrażeń
![]() ;
; ![]() .
.
|

Ryż. 2.13. Schematy stateczności dźwigu pływającego: a- statyczny M VK(Q); b - dynamiczny B(Q)
W przypadku żurawi z wysięgnikiem wychylnym kąty te są zmienne zarówno pod względem zasięgu, jak i obrotu.
Momenty przywracające podczas toczenia i dyferencjału określają wzory o postaci:
; (2.1)
Dla kątów przechyłu większych niż 15 ° wzór (2.1) nie ma zastosowania, a moment przywracający M VK w zależności od kąta θ zmiany zgodnie z wykresem stateczności statycznej (rys. 2.13). Ze stopniowym wzrostem momentu przechylającego do wartości równej maksymalnej wartości momentu przywracającego M VK max na schemacie, kąt przechyłu osiąga θ m a żuraw będzie niestabilny, ponieważ każde nieumyślne pochylenie się w stronę boku rolki spowoduje jego przewrócenie. Stosowanie momentów przechylających M θ ³ M VK max jest niepoprawne. Punkt DO(schemat zachodu słońca) charakteryzuje graniczny kąt przechyłu θ NS przekroczenie którego M VK< 0 i dźwig się przewraca. Schemat stateczności statycznej znajduje się w obowiązkowej dokumentacji żurawia; jego konstrukcja według rysunku pontonu lub według przybliżonych wzorów podana jest w pracy.
Z nagłym (lub w czasie krótszym niż półokres drgań naturalnych) przyłożeniem momentu dynamicznego do pontonu nienachylonego M D(patrz rys.2.13, a), która pozostaje stała w przyszłości, w początkowym okresie rzutu M D> M VK a statek przechyli się z przyspieszeniem, akumulując energię kinetyczną. Dotarcie do rogu statycznego przechyłu Q(punkt V), łódź przechyli się dalej do dynamicznego kąta przechyłu q D, gdy zapas energii kinetycznej jest zużywany na pokonanie pracy przywracającego momentu obrotowego i sił oporu (punkt Z odpowiadające równości obszarów OAV oraz CBE). Na q D £ 10 ... 15 O(rys. 2.13, a) można by to rozważyć q D = 2Q(biorąc pod uwagę wodoodporność) q D= 2 xQ, gdzie x- współczynnik tłumienia ( x " 0,7); w obecności początkowego kąta przechylenia ± q 0 dynamiczny kąt przechyłu q D = ± q 0+ 2Q. Wywrócenie dynamicznego momentu M D. OPR i kąt wywrotu q D. OPR określone przez znalezienie linii prostej AE odcinanie równych obszarów na wykresie stabilności statycznej OAV oraz BME(rys. 2.13, b).
Wykres stabilności dynamicznej (patrz rys. 2.13) jest wykresem zależności pracy momentu przywracającego B= D od kąta przechyłu ( lq- ramię momentu przywracającego podczas walcowania (patrz Rys. 2.12); jest to krzywa całkowa w odniesieniu do wykresu stateczności statycznej; ogrom d B = A B / D= zwany dynamicznym ramieniem stabilności. Ukojenie w pracy A K = M D q D = D d K, gdzie d K = A K / D D = M D q D / D– specyficzna praca momentu przechylającego. Harmonogram K (q D) jest linia prosta Z, przechodząc przez punkty O oraz F ze współrzędnymi (1 rad, M D); Punkt r skrzyżowania (patrz rys.2.13, a) lub dotknąć (patrz rys.2.13, b) wykresy stateczności dynamicznej z linią prostą Z określa kąt dynamicznego przechyłu q D (a) lub kąt przewrócenia z dynamicznym przechyleniem q D. OPR (b).
Dynamiczne przechylenie (lub trymowanie) występuje, gdy ładunek jest podnoszony z szarpnięciem lub gdy ładunek pęka. Na ryc. 2.14 pokazuje położenie lustra wody względem pontonu dla dźwigu bez obciążenia (pozycja równowagi) 1 pod kątem przechylenia q 0) oraz z obciążeniem podczas statycznego toczenia (pozycja 2 pod kątem przechylenia Q). Do normalnej pracy żurawia pożądane jest, aby wartości bezwzględne kątów przechyłu były równe dla załadowanego i pustego żurawia. Jeśli ładunek pęknie, dźwig będzie oscylował w stosunku do pozycji równowagi 1 z amplitudą Δ Q(patrz rys. 2.14), osiągając pozycję 3 pod kątem dynamicznego przechyłu q DIN = q 0+ Δ Q... Wartości tych ostatnich uzyskuje się dokładniej, jeśli weźmie się pod uwagę wodoodporność, zgodnie ze wzorem
q DIN= q 0+ (0,5–0,7) Q.

Ryż. 2.14. Schemat pontonu do określania dynamicznego przechyłu
Wyznaczanie momentu wywracającego i kąta przechyłu dynamicznego w stanie roboczym przy zerwaniu ładunku zgodnie z dynamicznym wykresem stateczności, a także sprawdzenie stateczności żurawia podczas przejścia, holu, nieczynnego; W pracy szczegółowo omówiono wyznaczanie momentu wywracającego w stanie schowanym oraz maksymalnego momentu przywracającego w stanie spoczynku.
Obciążenia mechanizmu obrotowego i zmiany zasięgu. Na ryc. 2.15, a pokazano poprzecznie (w płaszczyźnie) Tak) i wzdłużne (w płaszczyźnie X) przekrój pontonu po obróceniu pod kątem Q i przycinaj pod kątem ψ .
Waga G K część obrotowa żurawia z ładunkiem posiada elementy składowe S Y oraz S X działając w płaszczyźnie obrotu i określony przez zależności formy S Y = G K grzech Q oraz S X = G K grzech ψ .
Dla żurawia pływającego dodatkowy moment wywołany przechyleniem i przegłębieniem oraz działający na mechanizm obrotowy (rys. 2.11) jest określony wzorem
To wyrażenie można zbadać do maksimum M... W szczególności, jeśli składnik momentu przycinającego М ψ = G К a - G 0 b = 0(zrównoważony ponton), potem maksimum M osiąga się w φ = 45 o.
Siły S X oraz S Y mają elementy działające w płaszczyźnie obrotu wysięgnika i prostopadle do niej. Komponenty działające prostopadle do płaszczyzny wychylenia wysięgnika tworzą moment obciążający mechanizm obrotu, dla którego wyrażenie uzyskano powyżej. Całkowita siła T siły składowe S X oraz S Y w płaszczyźnie kołysania wysięgnika określa wyraz formy T = S X grzech φ + S Y sałata φ = G К ( grzech Q grzech φ – grzech ψ sałata φ).
Siła ta działa w płaszczyźnie obrotu bomu i jest kierowana wzdłuż pontonu. Na ryc. 2.15, b pokazany rozkład masy G K na siłę r prostopadłe do głównej płaszczyzny pontonu i uwzględnione w obliczeniach mechanizmu zmiany odlotu i siły T która jest równoległa do osi podłużnej pontonu i tworzy dodatkowe obciążenie spowodowane kołysaniem i wyważaniem. Tak więc w środku ciężkości każdego węzła obrotowego części żurawia (wysięgnika, bagażnika itp.) waga G i moc powstaje T i spowodowane rolowaniem i przycinaniem. Dodatkowy moment mładowanie mechanizmu zmiany wyjazdu jest określone przez formułę .
Obciążenia od sił bezwładności, działające na dźwig podczas poprzecznego i wzdłużnego kołysania statku, zostały szczegółowo przedstawione w pracach.
Niezatapialnosc- zdolność statku do utrzymania minimalnej koniecznej pływalności i stateczności po zalaniu jednego lub więcej przedziałów kadłuba. Obliczenia niezatapialnosci zostaly szczególowo przedstawione w pracy.